加速度传感器在汽车防盗系统中的应用研究
汽车防盗中,车体倾斜角度的测量要求其信号的噪声必须很小,这就要限制信号带宽。而对于振动的测量,则需要10~200Hz的较宽信号范围。首先,将XFILY、YFILT引脚的滤波电容CX、CY设定为0.027μF,这样输出的数字、模拟信号的带宽全都限制在200Hz以下,再将ADXl202输出的带宽为200Hz的数字和模拟信号分别经过低通滤波和高通滤波,就可以获得倾斜、振动监测所需带宽的信号。将ADXL202同时作为振动测量和倾角测量传感器的方案原理图如图4所示。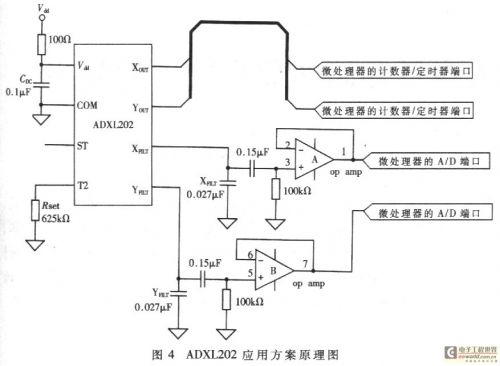
2.2 倾斜角度的测量
对于拖车或整车搬运的盗窃方式,如果车体的角度相对于初始状态改变5°,就可判定有盗车情况发生。
倾斜角度测量值通过XOUT、YOUT端口输出的数字信号得到。由于经XFILT、YFILT端口的电容低通滤波,信号带宽为200Hz.则根据ADXl202的噪声计算公式为:

其中,Noise为噪声的几何平均值,BW为信号带宽,f(Hz)为频率。则其噪声平均水平为:

如果ADXl202的敏感轴从水平位置变化了5°,就相当于ADXL202输出的数字信号改变约87mg,这样14.4mg的噪声水平就显得过高了。因为期望的噪声水平最多不能超过信号的十分之一,即8.7mg。将XOUT、YOUT端口输出的200Hz数字信号进行16次采样,并将采得的信号取平均值,就可以实现数字低通滤波,将信号的带宽降为12.5Hz。此时的噪声水平为:
这种噪声水平完全可以满足系统要求。
ADXl202的温度变化系数为2mg/℃,在监测的0°~5°倾角范围内,每改变1°,输出约改变17mg。由于室外昼夜温差很可能达到8.5℃,温度漂移很可能造成虚假报警,必须对其限制。可以利用软件微分器进行信号处理,即如果ADXL202的输出变化率大于87mg/min,就认为有警情;如果小于这个数值,就可以认为是由于温度变化引起的温度漂移,不予报警。
2.3 汽车微小振动的测量
通过对车体微小振动的测量,可以实现对破坏车体行为的监测。若在一个较短时间段内,振动的能量超过设定的阈值,就可以判定有破坏汽车的情况发生。
监测汽车微小振动所需信号由XFILT、YFILT端口获得。虽然在XFILT、YFITL端口输出的模拟信号已经过200Hz低通滤波,但仍需将信号再经10Hz高通滤波,才能达到振动监测所需的10~200Hz带宽要求。另外,从XFILT、YFILT端口输出的模拟信号负载能力很弱,可以将带通滤波后的信号送入电压跟随器,以提高其负载能力,然后,将信号送人微处理器内部的A/D端口进行模,数转换。根据采样定理(Nyquist Criteria),徽处理器采样频率定为400Hz,即每2.5ms采样一次。
利用软件积分器测量振动的能量,是将微处理器记录的16次振幅采样值的绝对值求和,即可得到40ms内振动的能量。如果这个绝对值之和超过设定的数字阈值,微处理器就可以进行报警。
利用加速度传感器ADXL202组成的防盗监测装置,不但拥有传统汽车防盗传感器件的灵敏性,而且扩大了汽车防盗的监测范围(可以对拖车和整车搬运的盗窃方式进行预警),而且还简化了系统的电路结构,提高了系统可靠性。ADXL202完全可以取代磁效应传感器等传统敏感元件。成为汽车防盗监测信号的可靠敏感器件。另外,ADXL202在计算机外围设备、信息产品、运动监测等方面也有着广泛的应用。
- 双轴加速度传感器在车载电子罗盘应用中的抗干扰设计(07-18)
- ADXL202在组合车载导航系统中的应用(09-15)
- 汽车ESP传感器及其接口技术详解(01-18)
- 汽车应用中的磁阻传感器 (02-18)
- 基于AVR的防汽车追尾安全装置设计(03-25)
- 基于AMR磁阻传感器和加速度传感器的电子罗盘(10-04)