汽车ESP传感器及其接口技术详解
引言
ESP(Electronic Stability Program,电子稳定程序)是汽车电控的一个标志性发明。不同的研发机构对这一系统的命名不尽相同,如博世(BOSCH)公司早期称为汽车动力学控制(VDC),现在博世、梅赛德-奔驰公司称为ESP;丰田公司称为汽车稳定性控制系统(VSC)、汽车稳定性辅助系统(VSA)或者汽车电子稳定控制系统(ESC);宝马公司称为动力学稳定控制系统(DSC)。尽管名称不尽相同,但都是在传统的汽车动力学控制系统,如ABS和TCS的基础上增加一个横向稳定控制器,通过控制横向和纵向力的分布和幅度,以便控制任何路况下汽车的动力学运动模式,从而能够在各种工况下提高汽车的动力性能,如制动、滑移、驱动等。ESP在国外已经批量生产,在国内尚处于研究阶段,要达到产业化的程度,还有大量的工作要做。
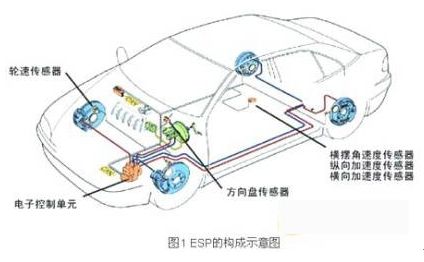
图1所示为汽车ESP传感器的构成示意图,其电子部件主要包括电子控制单元(ECU)、方向盘传感器、纵向加速度传感器、横向加速度传感器、横摆角速度传感器、轮速传感器等。ESP作为保证行车安全的一个重要电控系统,其各个传感器的正常工作是进行有效控制的基础。本文介绍了ESP常用传感器的特点,设计了传感器硬件接口和软件接口,并在实车测试中得到验证。
ESP常用传感器介绍
如图1、图2所示,ESP常用的传感器如下。
a.方向盘转角传感器
ESP通过计算方向盘转角的大小和转角变化速率来识别驾驶员的操作意图。方向盘转角传感器将方向盘转角转换为一个可以代表驾驶员期望的行驶方向的信号,方向盘转角一般是根据光电编码来确定的,安装在转向柱上的编码盘上包含了经过编码的转动方向、转角等信息。这一编码盘上的信息由接近式光电耦合器进行扫描。接通点火开关并且方向盘转角传感器转过一定角度后,处理器可以通过脉冲序列来确定当前的方向盘绝对转角。方向盘转角传感器与ECU的通讯一般通过CAN总线完成。
b.横摆角速度传感器
横摆角速度传感器检测汽车沿垂直轴的偏转,该偏转的大小代表汽车的稳定程度。如果偏转角速度达到一个阈值,说明汽车发生测滑或者甩尾的危险工况,则触发ESP控制。当车绕垂直方向轴线偏转时,传感器内的微音叉的振动平面发生变化,通过输出信号的变化计算横摆角速度。
c.纵向/横向加速度传感器
ESP中的加速度传感器有沿汽车前进方向的纵向加速度传感器和垂直于前进方向的横向加速度传感器,基本原理相同,只是成90°夹角安装。ESP一般使用微机械式加速度传感器,在传感器内部,一小片致密物质连接在一个可以移动的悬臂上,可以反映出汽车的纵向/横向加速度的大小,其输出在静态时为2.5V左右,正的加速度对应正的电压变化,负的加速度对应负的电压变化,每1.0~1.4V对应1g的加速度变化,具体参数因传感器不同而有所不同。
d.轮速传感器
在汽车上检测轮速信号时,最常用的传感器是电磁感应式传感器,一般做法是将传感器安装在车轮总成的非旋转部分(如转向节或轴头)上,与随车轮一起转动的导磁材料制成的齿圈相对。当齿圈相对传感器转动时,由于磁阻的变化,在传感器上激励出交变电压信号,这种交变电压的频率与车轮转速成正比, ECU采用专门的信号处理电路将传感器信号转换为同频率的方波,再通过测量方波的频率或周期来计算车轮转速。
最初的ESP系统中纵向/横向加速度传感器和横摆角速度传感器都是单独实现的,现在基本都使用了传感器总成(Sensor Cluster)的模式,将这3个传感器设计为一体,通过CAN总线与ECU通讯。如图3为SIMENS VDO公司和BEI公司生产的传感器总成。
博世公司为了增加新的ESP功能和为了更好的控制整车的稳定性系统,如山地保持控制(HHC)和线控(SbW),提出了模块化的HW和SW概念,开发了第三代高度灵活和低成本的慢性传感器总成DRS MM3.x。
ESP常用传感器接口设计
本文所作设计的框图如图4所示。在图中,方向盘转角传感器信号经微控制器处理后,通过CAN总线发送给ECU(图4中B);横摆角速度传感器、纵向/横向传感器由于信号特点和安装位置类似,故设计在同一个模块内(图4中A);由于ESP对轮速传感器信号的实时性要求较高,故经过信号调理后,直接送入ECU(图4中C)。在图4的A和B中,需要微处理器对信号进行处理并通过CAN总线传送数据,本文选用Infineon公司的SAK-C164CI。该芯片是专为汽车应用而设计,内置AD转换器、输入信号捕捉、正交解码器,运算速度快,非常适合ESP的传感器信号处理。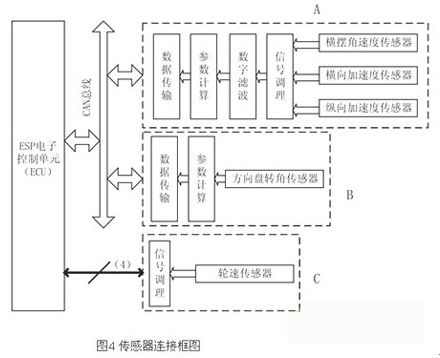
a.方向盘转角传感器接口
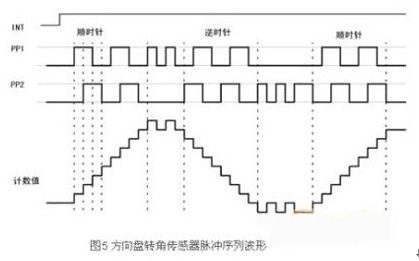
方向盘转角传感器的输出为正交编码脉冲。正交编码脉冲包含两个脉冲序列,有变化的频率和四分之一周期(90°)的固定相位偏移,如图5所示。通过检测2路信号的相位关系可以判断为顺时针方向和逆时针方向,并据此对信号进行加/减计数,从而得到当前的计数累计值,也即方向盘的绝对转角,而转角的变化率即角速度,则可通过信号频率测出。另外,方向盘转角传感器有一个零位输出信号,当方向盘在中间位置时,该信号输出0V,否则输出5V,通过该信号,可对绝对转角进行在线校准。