基于MC9S12DP256B的汽车防抱死系统设计
时间:08-06
来源:作者:北京交通大学电气工程学院 孙薇 汪至中
点击:
1前言
随着汽车行驶速度的提高,道路行车密度的增大,对于汽车行驶安全性能的要求也越来越高。汽车的防抱死制动系统(ABS)应运而生,它是以传统制动系统为基础,采用电子控制技术,在制动时防止车轮抱死的一种机电一体化系统。
2基于双CPU结构的防抱死系统
ABS系统设计中主要考虑以下几个问题:首先,由于ABS系统直接关系车辆的安全性能,因而它的故障问题显得极为重要,系统必须保证能及时检测故障并准确判断故障点;其次,ABS系统通常包含电磁阀等感性负载,驱动电流很大,需要适当的驱动电路;此外,为了便于ABS系统与车辆上其他系统进行通信,系统需要预留通信接口。
本文以原有的四传感器四通道(4S/4M)ABS电子控制单元为基础,开发了一个带有故障自检的气压ABS。设计中采用MCU+CPLD的双CPU结构,系统结构如图1所示。
控制CPU采集轮速信号,然后根据设定的减速度和滑移率门限值进行路面识别及制动控制,另外它还负责对轮速传感器进行静态检测。安全CPU(CPLD)则主要负责ABS系统的故障检测工作,判断故障部位,并将相应的故障码传输给控制CPU。产生故障后,由控制CPU统一对故障状态进行处理,包括中断ABS功能,恢复至常规制动,点亮故障显示灯,并将相应的故障代码存储在E2PROM中,需要时可随时通过CAN通信端口传输到上位机或车上其他电子控制系统。
3系统硬件设计
ABS系统故障主要为电磁阀故障、轮速信号采集系统的故障、制动管路压力信号采集系统的故障、电源故障和控制器故障。本系统针对这些故障均给出了相应的诊断电路。
4 MC9S12DP256B和CPLD概述
MC9S12DP256B是基于16位HCSl2CPU及0.25?m制造工艺的高速、高性能5.0VFLASH微控制器。该单片机使用了锁相环技术或内部倍频技术,使内部总线速度大大高于时钟产生器的频率,在同样速度下所使用的时钟频率较同类单片机低很多,因而高频噪声低,抗干扰能力强,更适合于汽车内部恶劣的环境。并且包含定时器、A/D转换、PWM输出、CAN通讯、E2PROM、SPI、SCI等多个模块,资源丰富,满足系统功能的开发要求。
系统中的CPLD采用XC9572TQ100,此款芯片支持扩展工业温度范围。它不仅工作温度范围更大,从-40℃~+100℃,而且还符合汽车业界特有的质量认定标准。此外,该芯片的门数和I/O数均符合设计要求,并留有功能扩展的余地。
5 数字输入通道诊断电路
轮速输入信号正确与否直接影响到ABS系统的工作。为此特地在信号处理电路之前加设数字开关,便于系统检测电路板数字输入通道。采用输入模拟法,由安全CPU(CPLD)向数字通道发出一组标准方波信号输入到控制CPU的输入捕捉端口进行测量。具体电路如图2所示。
CPLD产生DETECT信号控制数字开关CD4066的通断。ABS上电自检时,DETECT为"0",开关断开,轮速信号被屏蔽,此时由CPLD产生事先定义好的标准方波(频率为100Hz,即每个计数周期(0.1s)10个脉冲)并输出给主CPU。主CPU通过ECT口捕捉方波进行测量与计算,经与定义的该标准波的频率比较后,如果结果一致则说明数字输入通道正常,否则说明有故障出现。检测完毕,一切正常后,DETECT变为"1",开关接通,轮速信号经过信号整形放大单元、由CPLD输出至控制CPU。
6电磁阀驱动及其故障检测电路
汽车制动系统中电磁阀的工作电流为1.5~2.5A,而微控制器的输出电流远达不到这一要求,因此采用Freescale公司的高端驱动芯片MC33289来实现电磁阀的驱动。单通道的控制电路如图3所示。
由于MC33289的自检功能,应用时可将St引脚直接与CPU相连,一旦电磁阀出现故障,如短路或断路,St即自动置低,CPU接收到信号后立刻停止ABS功能,点亮故障显示灯,同时将相应的故障代码以中断的形式传输给控制CPU。对电磁阀驱动状况的检测通过比较MC33289的输出OUT与输入IN来完成。在正常情况下同一路的两个逻辑值应相等,同时为"1"或"0";若不相等,则说明驱动芯片出现故障,CPU必须中断ABS功能,点亮故障显示灯并传输故障码。
7 故障码存储及传输
MC9S12DP256B自带4KB的E2PROM,地址从0x400到0xFFF。无须外扩E2PROM,可用于对故障码的存储,便于数据长期保存。
擦、写操作前必须通过设置E2PROM时钟分配寄存器ECLKdiv,将模块时钟配置在150KHz至200KHz之间。系统中的晶振为16MHz,总线频率8MHz,经计算,取ECLKdiv=0x4A,即预分频因子PRdiv8=1,分频因子Ediv[5:0]=001010,模块的时钟为182KHz。
因为每次写操作均以字进行,所以为安全起见,擦除时每次擦两个字。擦除操作的时序与写操作完全相同,只不过相应地址写入的数据均为"0"。
此外,系统结合自身CAN模块,选用Philips公司的PCA82C250,设置了CAN的接口电路,便于故障码的传输。接口电路如图4所示。
随着汽车行驶速度的提高,道路行车密度的增大,对于汽车行驶安全性能的要求也越来越高。汽车的防抱死制动系统(ABS)应运而生,它是以传统制动系统为基础,采用电子控制技术,在制动时防止车轮抱死的一种机电一体化系统。
2基于双CPU结构的防抱死系统
ABS系统设计中主要考虑以下几个问题:首先,由于ABS系统直接关系车辆的安全性能,因而它的故障问题显得极为重要,系统必须保证能及时检测故障并准确判断故障点;其次,ABS系统通常包含电磁阀等感性负载,驱动电流很大,需要适当的驱动电路;此外,为了便于ABS系统与车辆上其他系统进行通信,系统需要预留通信接口。
本文以原有的四传感器四通道(4S/4M)ABS电子控制单元为基础,开发了一个带有故障自检的气压ABS。设计中采用MCU+CPLD的双CPU结构,系统结构如图1所示。
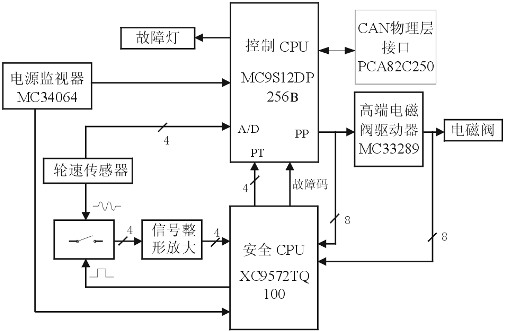
控制CPU采集轮速信号,然后根据设定的减速度和滑移率门限值进行路面识别及制动控制,另外它还负责对轮速传感器进行静态检测。安全CPU(CPLD)则主要负责ABS系统的故障检测工作,判断故障部位,并将相应的故障码传输给控制CPU。产生故障后,由控制CPU统一对故障状态进行处理,包括中断ABS功能,恢复至常规制动,点亮故障显示灯,并将相应的故障代码存储在E2PROM中,需要时可随时通过CAN通信端口传输到上位机或车上其他电子控制系统。
3系统硬件设计
ABS系统故障主要为电磁阀故障、轮速信号采集系统的故障、制动管路压力信号采集系统的故障、电源故障和控制器故障。本系统针对这些故障均给出了相应的诊断电路。
4 MC9S12DP256B和CPLD概述
MC9S12DP256B是基于16位HCSl2CPU及0.25?m制造工艺的高速、高性能5.0VFLASH微控制器。该单片机使用了锁相环技术或内部倍频技术,使内部总线速度大大高于时钟产生器的频率,在同样速度下所使用的时钟频率较同类单片机低很多,因而高频噪声低,抗干扰能力强,更适合于汽车内部恶劣的环境。并且包含定时器、A/D转换、PWM输出、CAN通讯、E2PROM、SPI、SCI等多个模块,资源丰富,满足系统功能的开发要求。
系统中的CPLD采用XC9572TQ100,此款芯片支持扩展工业温度范围。它不仅工作温度范围更大,从-40℃~+100℃,而且还符合汽车业界特有的质量认定标准。此外,该芯片的门数和I/O数均符合设计要求,并留有功能扩展的余地。
5 数字输入通道诊断电路
轮速输入信号正确与否直接影响到ABS系统的工作。为此特地在信号处理电路之前加设数字开关,便于系统检测电路板数字输入通道。采用输入模拟法,由安全CPU(CPLD)向数字通道发出一组标准方波信号输入到控制CPU的输入捕捉端口进行测量。具体电路如图2所示。
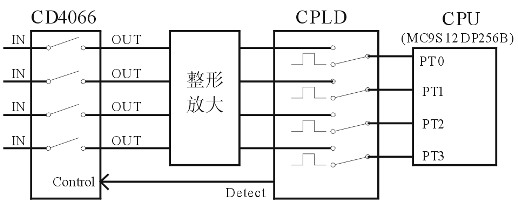
CPLD产生DETECT信号控制数字开关CD4066的通断。ABS上电自检时,DETECT为"0",开关断开,轮速信号被屏蔽,此时由CPLD产生事先定义好的标准方波(频率为100Hz,即每个计数周期(0.1s)10个脉冲)并输出给主CPU。主CPU通过ECT口捕捉方波进行测量与计算,经与定义的该标准波的频率比较后,如果结果一致则说明数字输入通道正常,否则说明有故障出现。检测完毕,一切正常后,DETECT变为"1",开关接通,轮速信号经过信号整形放大单元、由CPLD输出至控制CPU。
6电磁阀驱动及其故障检测电路
汽车制动系统中电磁阀的工作电流为1.5~2.5A,而微控制器的输出电流远达不到这一要求,因此采用Freescale公司的高端驱动芯片MC33289来实现电磁阀的驱动。单通道的控制电路如图3所示。

由于MC33289的自检功能,应用时可将St引脚直接与CPU相连,一旦电磁阀出现故障,如短路或断路,St即自动置低,CPU接收到信号后立刻停止ABS功能,点亮故障显示灯,同时将相应的故障代码以中断的形式传输给控制CPU。对电磁阀驱动状况的检测通过比较MC33289的输出OUT与输入IN来完成。在正常情况下同一路的两个逻辑值应相等,同时为"1"或"0";若不相等,则说明驱动芯片出现故障,CPU必须中断ABS功能,点亮故障显示灯并传输故障码。
7 故障码存储及传输
MC9S12DP256B自带4KB的E2PROM,地址从0x400到0xFFF。无须外扩E2PROM,可用于对故障码的存储,便于数据长期保存。
擦、写操作前必须通过设置E2PROM时钟分配寄存器ECLKdiv,将模块时钟配置在150KHz至200KHz之间。系统中的晶振为16MHz,总线频率8MHz,经计算,取ECLKdiv=0x4A,即预分频因子PRdiv8=1,分频因子Ediv[5:0]=001010,模块的时钟为182KHz。
因为每次写操作均以字进行,所以为安全起见,擦除时每次擦两个字。擦除操作的时序与写操作完全相同,只不过相应地址写入的数据均为"0"。
此外,系统结合自身CAN模块,选用Philips公司的PCA82C250,设置了CAN的接口电路,便于故障码的传输。接口电路如图4所示。
MC9S12DP256B 汽车 防抱死系统 ABS 相关文章:
- 电子技术的革新先锋(11-21)
- 利用FPGA协处理器优化汽车信息娱乐和信息通讯系统设计(01-24)
- 汽车收音机TDA7513射频电路应用指南(01-24)
- 基于NI Flex II创新技术的通用仪器可提供最高动态性能(01-24)
- 硬盘驱动器(HDD)新技术瞄准未来数字汽车应用(01-24)
- 当前汽车信息娱乐系统的软件技术需求分析(02-05)