当今汽车中的供电连接
时间:08-21
来源:
点击:
当代高级汽车,为了追求高性能,低油耗,低幅射,提高舒适性、方便性和安全性,需要配备大量的电子装置。每种新型车辆系统或电气功能的出现都伴随着连接性的增加。新兴的信息通信和驱动器信息系统领域更要整合多种技术来增强汽车安全性,通信功能、方便性以及娱乐性。这些技术涉及动态导航、无线连接/因特网接入、语音处理、汽车收音机、虚拟仪表面板、防撞系统等等。通过这些电子装置,汽车与车内系统、其它汽车,驱动器和扩充通信网络相互作用,并支持多种车内应用。毫无疑问,这些系统也需要一种汽车专用的供电方案。
汽车总线
汽车复杂电子装置的先驱是引擎控制系统。它经过扩充后目前称为动力链(Power-Train)系统,其中包含了传输控制和高级车内诊断功能。车用动力链总线既要高速度,又要具有经济实用的数据传输能力。
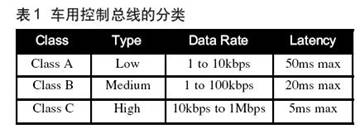
如表1所示,SAE最初定义了低、中、高速三类数据通信汽车网络。控制器局域网(CAN)和SAE J-1850一直占据着主流地位,但也不是唯一的总线体系结构。
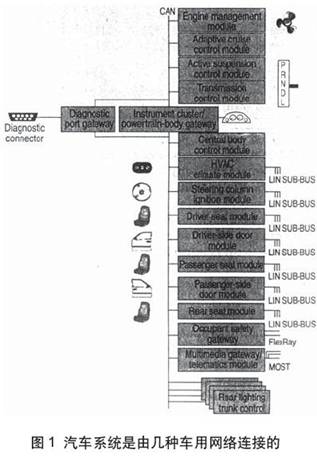
CAN 具有低、高速两种实施方案,使用不同电压在一对导线上进行通信,通常称为高速物理层和低速物理层。当两根导线中一根因短路或一路发生故障时,低速体系结构变为单线工作体系结构(所谓离线地)。由于电路需要具备这一功能的缘故,这种体系结构在超过125Kbps总线速率时,其实施成本是十分昂贵的。因此,125Kbps是高速与低速CAN的分界线。图1表示CAN支持其它车用网络的连接方法。
为了实现这类高功率控制系统,需要一种容错的、时间触发的体系结构。目前,在这个领域争夺领导地位的有三种协议。Flex Ray采用光纤,当然也能在铜线上工作,数据传输速率达10Mbps。另一类是TTP(时间触发协议)使用铜线,数据率仅2Mbps,但Vienna大学的研究人员正在开展使用光纤的探索。第三种协议TT-CAN,既支持"时间触发"应用,也支持"事件触发"应用。
汽车多媒体接口联盟,或 AMI-C,正在制订移动信息和娱乐系统多媒体标准。AMI-C的主要工作集中在多目标信息和多媒体技术,想方设法解决Bluetooth、IEEE- 1394和面向媒体系统传输(MOST)基车内网络的使用。Bluetooth为车辆环境提供无线连接;IEEEE-1394已在消费类环境中连接几种多媒体产品;MOST则是专为汽车视频和音频流数据开发的光媒体基协议。
对上面已讨论过的所有网络协议(除LIN外),要想实现全部系统功能需要功能更强的微处理器。
电源的特殊要求
在汽车应用中,多种电源电压和宽温度范围内电压精度亟需特殊的电源电路。两个突出的例子是物理层电源要求和高级微处理要求的多种电压加电顺序。
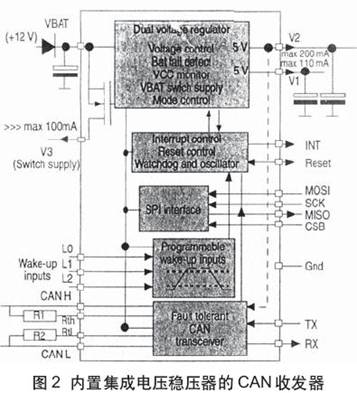
简单的物理层器件未必能胜任某些汽车应用。例如,所有汽车模块要求使用稳压电源。有时,一个本地开关或传感器会将模块唤醒,从休眠状态进入有源工作状态。该开关或传感器是以车辆电池工作的。为了简化车辆中物理层应用的电源设计,已研制出专用的电源IC,如Motorola的系统偏压芯片(SBC)族。其中 MC33389兼备汽车CAN连接的CAN物理层功能和稳压器功能,内置独立的看门狗定时器和本地唤醒电路,以最少元件求得最大的灵活性(图2)。在一个封装内组合这些功能需要先进的混合信号半导体工艺,如Motorola的SmARTMOSTM工艺。集成化设计降低了组装成本,提高了可靠性,还增加了设计的灵活性。
IC提供脱离CAN接口工作模式的三种工作模式(正常、备用和休眠),并能访问低速125K波特率容错CAN接口。芯片的直流工作电压高达27V,并能承爱40V最大瞬时电压。此外,IC可在汽车极限应用的-40℃~125℃温度范围内工作。
汽车总线
汽车复杂电子装置的先驱是引擎控制系统。它经过扩充后目前称为动力链(Power-Train)系统,其中包含了传输控制和高级车内诊断功能。车用动力链总线既要高速度,又要具有经济实用的数据传输能力。
如表1所示,SAE最初定义了低、中、高速三类数据通信汽车网络。控制器局域网(CAN)和SAE J-1850一直占据着主流地位,但也不是唯一的总线体系结构。
CAN 具有低、高速两种实施方案,使用不同电压在一对导线上进行通信,通常称为高速物理层和低速物理层。当两根导线中一根因短路或一路发生故障时,低速体系结构变为单线工作体系结构(所谓离线地)。由于电路需要具备这一功能的缘故,这种体系结构在超过125Kbps总线速率时,其实施成本是十分昂贵的。因此,125Kbps是高速与低速CAN的分界线。图1表示CAN支持其它车用网络的连接方法。

为了实现这类高功率控制系统,需要一种容错的、时间触发的体系结构。目前,在这个领域争夺领导地位的有三种协议。Flex Ray采用光纤,当然也能在铜线上工作,数据传输速率达10Mbps。另一类是TTP(时间触发协议)使用铜线,数据率仅2Mbps,但Vienna大学的研究人员正在开展使用光纤的探索。第三种协议TT-CAN,既支持"时间触发"应用,也支持"事件触发"应用。
汽车多媒体接口联盟,或 AMI-C,正在制订移动信息和娱乐系统多媒体标准。AMI-C的主要工作集中在多目标信息和多媒体技术,想方设法解决Bluetooth、IEEE- 1394和面向媒体系统传输(MOST)基车内网络的使用。Bluetooth为车辆环境提供无线连接;IEEEE-1394已在消费类环境中连接几种多媒体产品;MOST则是专为汽车视频和音频流数据开发的光媒体基协议。
对上面已讨论过的所有网络协议(除LIN外),要想实现全部系统功能需要功能更强的微处理器。
电源的特殊要求
在汽车应用中,多种电源电压和宽温度范围内电压精度亟需特殊的电源电路。两个突出的例子是物理层电源要求和高级微处理要求的多种电压加电顺序。
简单的物理层器件未必能胜任某些汽车应用。例如,所有汽车模块要求使用稳压电源。有时,一个本地开关或传感器会将模块唤醒,从休眠状态进入有源工作状态。该开关或传感器是以车辆电池工作的。为了简化车辆中物理层应用的电源设计,已研制出专用的电源IC,如Motorola的系统偏压芯片(SBC)族。其中 MC33389兼备汽车CAN连接的CAN物理层功能和稳压器功能,内置独立的看门狗定时器和本地唤醒电路,以最少元件求得最大的灵活性(图2)。在一个封装内组合这些功能需要先进的混合信号半导体工艺,如Motorola的SmARTMOSTM工艺。集成化设计降低了组装成本,提高了可靠性,还增加了设计的灵活性。
IC提供脱离CAN接口工作模式的三种工作模式(正常、备用和休眠),并能访问低速125K波特率容错CAN接口。芯片的直流工作电压高达27V,并能承爱40V最大瞬时电压。此外,IC可在汽车极限应用的-40℃~125℃温度范围内工作。
- 电子技术的革新先锋(11-21)
- 利用FPGA协处理器优化汽车信息娱乐和信息通讯系统设计(01-24)
- 汽车收音机TDA7513射频电路应用指南(01-24)
- 基于NI Flex II创新技术的通用仪器可提供最高动态性能(01-24)
- 硬盘驱动器(HDD)新技术瞄准未来数字汽车应用(01-24)
- 当前汽车信息娱乐系统的软件技术需求分析(02-05)