倒车雷达主控芯片GM3101的功能特性分析
时间:01-24
来源:成都国腾微电子有限公司 袁杰
点击:
峰值检测电路波形图
2. 增益控制超声波回波信号有一个现象,即近距离物体发射回来的信号较强,远距离物体发射回来的信号较弱。如果要检测远距离物体,就需要加大放大倍数,余振也会被相应地放大,为以后屏蔽余振带来困难。如何设置放大倍数兼顾远近距离,这就是电路设计的关键,我们采用自动增益选择器来解决这一问题。对远距离物体,放大倍数较大,对近距离物体,放大倍数较小。在设计第二级放大器时,根据物体距离的不同而采用四种不同的放大倍数。图6为第二级放大电路原理图。
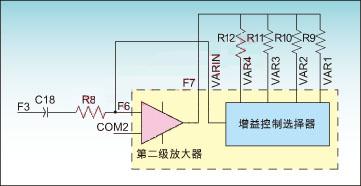
图6:第二级放大电路原理图
图6中,虚线内的部分为芯片内部电路。C18、R8、R9、R10、R11、R12为外接元器件,采用增益控制选择器是为了设置四个不同的放大倍数。超声波探头工作时,为了保证在不同距离下,F7输出信号的幅度大体相同,所以根据物体距离的不同而采用四种不同的放大倍数:在小于0.6m,放大倍数为R9/R8,典型值为3;在0.6m到1.2m之间,放大倍数为R10/R8,典型值为8.2;1.2m到1.8m之间,放大倍数为R11/R8,典型值为10;大于1.8m,放大倍数为R12/R8,典型值为12。观察在引脚F7处的近距离物体和远距离物体的信号波形图,通过对比可以看出,由于采用了自动增益选择器,实现F7信号幅度基本相同,保证距离为3m的物体也能够检测到。
本文小结
通过上面的介绍,我们可以看出由于GM3101采用了余振屏蔽和自动增益控制器,使得系统功能超过了传统方案,其稳定性也大大加强,同时避免了软件控制中存在的不稳定因素。对倒车雷达生产商来说,不仅能降低开发和生产成本,对整机的可靠性也有了很大提高。所以我们有理由相信用于倒车雷达测距的单芯片方案会逐步替代传统的单片机方案。
倒车雷达 相关文章:
- 专家解答网友提问 如何选购倒车雷达(06-08)
- 汽车倒车雷达系统的设计与实现(06-13)
- 汽车倒车障碍检测系统解决方案(04-10)
- 基于LIN总线的倒车雷达系统的设计与实现(05-23)
- 倒车多媒体可视测距终端的设计与实现(06-09)
- 基于MSP430的倒车雷达设计(06-15)