汽车倒车雷达系统的设计与实现
时间:06-13
来源:作者:吴琼 封维忠 马文杰
点击:
0 引 言
随着中国经济的持续增长和汽车价格的持续下降,越来越多的家庭拥有了私家车。在享受汽车给人们带来便利的同时,由于倒车而产生的问题也日益突出。据初步调查统计,15%的汽车事故是由汽车倒车"后视"不良造成的。早期的倒车防撞仪可以测试车后一定距离范围的障碍物从而发出警报,后来发展到根据距离分段报警。随着人们对汽车驾驶辅助系统易用性要求的提高,对汽车倒车雷达的要求也越来越高。本文设计的基于单片机AT89C51的倒车雷达,采用美国DAL-LAS 半导体公司生产的DS18B20单总线型数字温度传感器进行温度补偿提高了测距精度,采用OC-MJ12232C_3液晶显示模块对车距进行实时显示和 ISD4004语音芯片实现了倒车雷达语音报警的功能,并可以根据距离的不同做出不同的语音提示。由于采用了超声波专用集成电路芯片LM1812,有效地提高了系统的可靠性和稳定性。
1 超声波测距原理
超声传感器是一种将其他形式的能转变为所需频率的超声能或是把超声能转变为同频率的其他形式的能的器件。超声波测距原理是利用单片机在超声波传感器发射超声波的同时单片机的T0计数器开始计数,当检测到回波信号后单片机的T0计数器停止计数。测得的时间和声速相乘就可以得到超声波往返过程中走过的路程,所以所测距离S为声波传输距离的一半:
S=Ct/2
式中:S为超声波发射点与被测障碍物之间的距离;C为声波在介质中的传输速率;t为超声波发射到超声波返回的时间间隔。声波在空气中传输速率为:
采用单片机脉冲计数的方法,可精确测出t的值。假设单片机的机器周期为T机,则有t=NT机,则测得的距离为:
2.1 系统结构
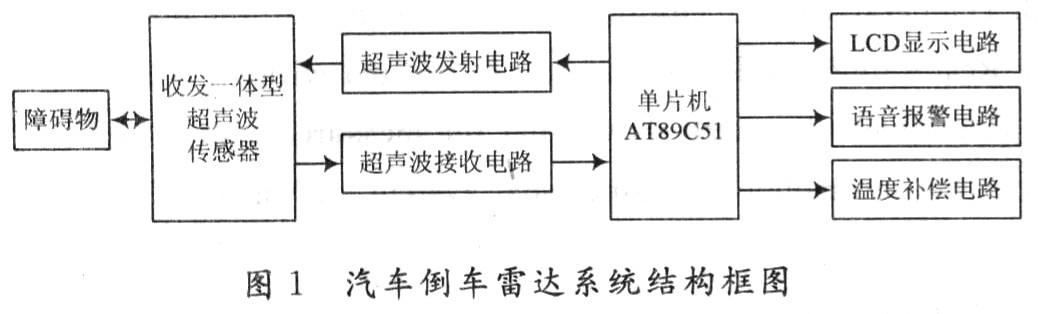
系统框图如图1所示。该系统由单片机控制电路、超声波发射与接收电路、温度补偿电路、LCD显示电路以及语音报警电路等几部分组成。单片机AT89C51 是整个系统的核心部件,协调各部分电路的工作。单片机在超声波信号发射的同时开始计时,超声波信号在空气中传播遇到障碍物后发生反射,反射的回波信号经过处理后输入到单片机的INTO端产生中断,计数器停止计数。通过计数器测得的脉冲数可得到超声波信号往返所需要的时间,从而达到测距的目的。超声波探头选用TCF40-25TR1型收发一体式超声波传感器,谐振频率为40 kHz;超声发射与接收电路采用LM1812专业集成电路,不仅外围元件较少,电路简单,而且有更好的稳定性及可靠性;温度补偿电路采用一线制数字温度传感器DS18B20,利用声速和温度之间的关系对声速进行校正,从而消除温度对声速的影响;语音报警电路采用ISD4004,可实现汽车倒车过程中的语音报警。
系统控制部分的核心是ATMEL公司生产的AT89C51。AT89C51采用40引脚的双列直插式封装(DIP)形式,内部由CPU,4 KB的ROM,256 B的RAM,2个16位的定时/计数器T0和T1,4个8位的I/O端口和一个全双工串行通信口等部分组成。AT89C51单片机具有系统结构简单,成本低,可靠性高,低功耗等特点。特别是内部集成了4 KB的FLASH程序存储器,使单片机系统的结构更加简单,也使其得到了广泛的应用。同时,它还具有高级语言编程的特点,指令丰富,软件开发简单。 AT89C51单片机是整个系统的核心部件,其作用是控制超声波专用集成芯片LM1812的发射和接收,对计时器的计数结果进行数据处理后送入LCD显示以及控制语音报警电路工作。
2.3 超声波发射和接收电路
本系统采用超声波专用集成电路LM1812作为超声波发射和接收电路的主控芯片。LM1812是一种通用型超声波收发器,主要用在各种各样的测距、定向和通信中。芯片包括一个脉冲调制C类发射器,一个高增益接收器,一个脉冲调制检测器及噪音抑制电路。LM1812第1脚外接L1,C1决定了电路发送或接收的工作频率,其工作频率为:
随着中国经济的持续增长和汽车价格的持续下降,越来越多的家庭拥有了私家车。在享受汽车给人们带来便利的同时,由于倒车而产生的问题也日益突出。据初步调查统计,15%的汽车事故是由汽车倒车"后视"不良造成的。早期的倒车防撞仪可以测试车后一定距离范围的障碍物从而发出警报,后来发展到根据距离分段报警。随着人们对汽车驾驶辅助系统易用性要求的提高,对汽车倒车雷达的要求也越来越高。本文设计的基于单片机AT89C51的倒车雷达,采用美国DAL-LAS 半导体公司生产的DS18B20单总线型数字温度传感器进行温度补偿提高了测距精度,采用OC-MJ12232C_3液晶显示模块对车距进行实时显示和 ISD4004语音芯片实现了倒车雷达语音报警的功能,并可以根据距离的不同做出不同的语音提示。由于采用了超声波专用集成电路芯片LM1812,有效地提高了系统的可靠性和稳定性。
1 超声波测距原理
超声传感器是一种将其他形式的能转变为所需频率的超声能或是把超声能转变为同频率的其他形式的能的器件。超声波测距原理是利用单片机在超声波传感器发射超声波的同时单片机的T0计数器开始计数,当检测到回波信号后单片机的T0计数器停止计数。测得的时间和声速相乘就可以得到超声波往返过程中走过的路程,所以所测距离S为声波传输距离的一半:
S=Ct/2
式中:S为超声波发射点与被测障碍物之间的距离;C为声波在介质中的传输速率;t为超声波发射到超声波返回的时间间隔。声波在空气中传输速率为:

采用单片机脉冲计数的方法,可精确测出t的值。假设单片机的机器周期为T机,则有t=NT机,则测得的距离为:

2.1 系统结构
系统框图如图1所示。该系统由单片机控制电路、超声波发射与接收电路、温度补偿电路、LCD显示电路以及语音报警电路等几部分组成。单片机AT89C51 是整个系统的核心部件,协调各部分电路的工作。单片机在超声波信号发射的同时开始计时,超声波信号在空气中传播遇到障碍物后发生反射,反射的回波信号经过处理后输入到单片机的INTO端产生中断,计数器停止计数。通过计数器测得的脉冲数可得到超声波信号往返所需要的时间,从而达到测距的目的。超声波探头选用TCF40-25TR1型收发一体式超声波传感器,谐振频率为40 kHz;超声发射与接收电路采用LM1812专业集成电路,不仅外围元件较少,电路简单,而且有更好的稳定性及可靠性;温度补偿电路采用一线制数字温度传感器DS18B20,利用声速和温度之间的关系对声速进行校正,从而消除温度对声速的影响;语音报警电路采用ISD4004,可实现汽车倒车过程中的语音报警。
系统控制部分的核心是ATMEL公司生产的AT89C51。AT89C51采用40引脚的双列直插式封装(DIP)形式,内部由CPU,4 KB的ROM,256 B的RAM,2个16位的定时/计数器T0和T1,4个8位的I/O端口和一个全双工串行通信口等部分组成。AT89C51单片机具有系统结构简单,成本低,可靠性高,低功耗等特点。特别是内部集成了4 KB的FLASH程序存储器,使单片机系统的结构更加简单,也使其得到了广泛的应用。同时,它还具有高级语言编程的特点,指令丰富,软件开发简单。 AT89C51单片机是整个系统的核心部件,其作用是控制超声波专用集成芯片LM1812的发射和接收,对计时器的计数结果进行数据处理后送入LCD显示以及控制语音报警电路工作。
2.3 超声波发射和接收电路
本系统采用超声波专用集成电路LM1812作为超声波发射和接收电路的主控芯片。LM1812是一种通用型超声波收发器,主要用在各种各样的测距、定向和通信中。芯片包括一个脉冲调制C类发射器,一个高增益接收器,一个脉冲调制检测器及噪音抑制电路。LM1812第1脚外接L1,C1决定了电路发送或接收的工作频率,其工作频率为:
 改变电感L1,电容C1的值可以改变振荡频率(本系统中f0为40 kHz),最高可达325 kHz。超声波发射和接收电路如图2所示。当LM1812的8脚为高电平时,LM1812处于发射模式;当8脚为低电平时,LM1812处于接收模式。值得注意的是,单片机到LM1812的连接要进行5~12 V的电平转换。当LM1812处于发射模式时,L1,C1振荡槽路被切换为振荡模式,振荡信号经驱动放大后,由13脚及6脚输出。6,13脚之间所接变压器线圈的匝数比是根据TCF40-25TR1型收发一体式超声波传感器的阻抗来确定的。实验证明,变压器线圈的匝数比大约为4:1时可实现与超声波发送器阻抗相匹配。超声波接收器接收到的超声波信号经电容耦合由4脚输入,再经内部两级放大后同由1脚的谐
改变电感L1,电容C1的值可以改变振荡频率(本系统中f0为40 kHz),最高可达325 kHz。超声波发射和接收电路如图2所示。当LM1812的8脚为高电平时,LM1812处于发射模式;当8脚为低电平时,LM1812处于接收模式。值得注意的是,单片机到LM1812的连接要进行5~12 V的电平转换。当LM1812处于发射模式时,L1,C1振荡槽路被切换为振荡模式,振荡信号经驱动放大后,由13脚及6脚输出。6,13脚之间所接变压器线圈的匝数比是根据TCF40-25TR1型收发一体式超声波传感器的阻抗来确定的。实验证明,变压器线圈的匝数比大约为4:1时可实现与超声波发送器阻抗相匹配。超声波接收器接收到的超声波信号经电容耦合由4脚输入,再经内部两级放大后同由1脚的谐
- 电子技术的革新先锋(11-21)
- 利用FPGA协处理器优化汽车信息娱乐和信息通讯系统设计(01-24)
- 汽车收音机TDA7513射频电路应用指南(01-24)
- 基于NI Flex II创新技术的通用仪器可提供最高动态性能(01-24)
- 硬盘驱动器(HDD)新技术瞄准未来数字汽车应用(01-24)
- 当前汽车信息娱乐系统的软件技术需求分析(02-05)