基于ARM的嵌入式USB图像采集与显示
引言
目前市场上大部分的图像采集与处理系统是基于DSP 芯片的,这种图像采集与处理系统成本高、功耗高、体积约束等特点并不适用于一些简单的应用。随着USB 摄像头的普及和基于ARM 的嵌入式芯片的快速发展,将二者结合的便携性越来越受人们欢迎。本文介绍了一种基于三星S3C2440A 芯片的嵌入式USB 摄像头图像采集与显示方案,该方案具有良好的可移植性和扩展性,并且成本、大小和实时处理都能够满足市场需求。
1 系统架构
系统通过当前市场上应用最广泛的中芯微公司生产的zc301p 芯片的USB 摄像头进行图像采集,然后将图像信息传送到ARM 芯片中进行处理,最终通过基于Qt/Embedded 编写的图形显示程序在LCD 上实时显示。系统的整体架构如图1 所示。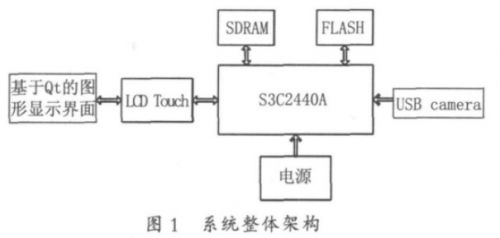
2 视频图像采集
系统采用中芯微公司生产的zc301p 芯片的USB 摄像头作为图像采集设备,并介绍了基于Video4Linux 编程协议进行视频图像采集的一般过程。
2.1 USB 摄像头驱动
Linux 内核能够很好地支持OHCI(开放式主机控制接口协议),并且能够很好地支持包括OV511系列摄像头在内的各种各样的USB 设备,但是并不包括zc301pUSB 摄像头。直到后来2.6.27 版本左右的内核中才增加了针对zc301 系列芯片的驱动,统称为Linux UVC.本文采用的是Linux2.6.32.2 版本内核,只需要对内核进行简单的配置,就可以实现功能了。
在配置菜单选项中,设备驱动是最重要的配置项。选择的配置项如下:
Device Drivers - - - >
Multimedia devices - - - >
Video For Linux
Enable Video For Linux API 1(DEPRECAteD)
Video capture adapters - - - >
V4L USB devices - - - >
USB Video Class (UVC)
UVC input events device support
GSPCA based webcams - - - >
ZC3XXX USB CAMEra Driver
USB ZC0301 [P]Image Processor and Control
Chip support
现在,内核被配置成可以支持Video4Linux 的视频接口,并且加入了支持zc301pUSB 摄像头的驱动程序。
2.2 基于Video4Linux 的视频图像采集程序设计
Video4Linux(简称V4L)为目前市场常见的电视捕获卡和并口及USB 口的摄像头提供统一的编程接口。在Linux 内核中它为用户空间提供统一的编程接口,V4L 分为两层:底层是音频和视频设备驱动程序的内核;上层为系统提供一些API 接口信息。视频图像采集流程如图2 所示。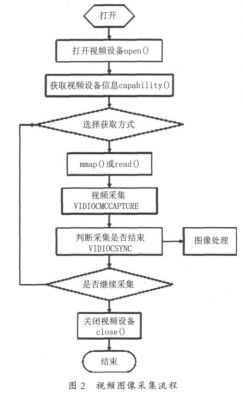
(1)打开视频设备。
在Linux 中视频设备是被作为设备文件来执行的,本文USB 摄像头的设备文件名为/dev/video0.
int my_v4l_open (char*dev,my_v4l_STruct*vd) 函数用于打开视频设备并初始化摄像头设备,该函数调用open 函数可以读设备文件,成功返回设备描述符,失败返回- 1.主要程序代码如下:
int my_v4l_open(char*dev,my_v4l_struct*vd){
if((vd- >fd=open(vd- >videodevice,O_RDWR))= =- 1){
printf("ERROR opening V4L interface");
exit(1);}
……}
(2)读设备信息。
int my_v4l_get_capability (my_v4l_struct*) 函数的功能是读取设备基本信息, 它利用ioctl(vd_fd,VIDIOCGCAP,&(vd- >capability) 来读取有关摄像头的信息。该函数成功返回后将这些信息从内核空间拷贝到用户程序空间capability 各成员分量中,使用printf 函数就可得到各成员分量信息。具体如下:
int my_v4l_get_capability(my_v4l_struct*){
if(ioctl(vd- >fd,VIDIOCGPICT,&(vd- >capability))<0){
printf("error:v4l_get_capabilityn");
exit(1);}
return 0;}
(3)视频图像采集。
本文通过mmap 方式来采集视频图像信息。为了获得映射的帧缓冲信息,my_v4l_mmap_init(my_v4l_struct*)函数需先初始化缓冲区,并进行内存与缓冲区的绑定,其中函数mmap 用于将文件fd与video_mbuf 绑定实现映射,函数mmap()返回值是系统实际分配的起始地址。函数my_v4l_mmap_init()的部分代码实现如下:
void my_v4l_mmap_init(my_v4l_struct*vd){
……
ioctl(vd- >fd,VIDIOCGMBUF,&(vd- >mbuf));// 初始化video_mbuf 以得到所映射的buffer的信息
vd- >pframebuffer= (unsigned char*)mmap (0,
vd- >videombuf.size,
PROT_READ|PROT_WRITE,MAP_SHARED,vd- >fd,0);
/* 把文件fd 与video_mbuf 绑定,实现映射*/
vd- >mmapsize=vd- >videombuf.size;
vd- >vmmap.height=vd- >hdrheight;
vd- >vmmap.width=vd- >hdrwidth;
vd- >vmmap.format=vd- >formaTIn;
vd- >vmmap.frame=0;
……}
然后利用驱动程序的ioctl () 函数的VIDIOCMCCAPTURE 和VIDIOCSYNC 命令来获取图像。其中ioctl (vd- >fd,VIDIOCMCAPTURE,&(vd- >mmap)) 开始一帧图像的采集,是非阻塞的;ioctl(vd- >fd,VIDIOCSYNC,&frame)用于判断一帧图像采集过程结束与否,frame 是当前采集的帧的序号。
采集工作结束后调用munmap 取消文件fd 与video_mbuf 的绑定。
munmap(vd- >map,vd- >mbuf.size);
(4)关闭设备在视频采集完成后,必需关闭视频设备。
close(vd- >fd);
- 基于ARM Linux的图像采集与蓝牙传输(08-03)
- 基于FPGA和ARM的图像采集传输系统(11-05)
- 图像采集压缩SOC系统在FPGA中的实现(11-07)
- 基于嵌入式ARM的图像采集与传输设计(03-03)
- 基于ARM9的CMOS图像采集系统的设计与实现(10-01)
- 基于ARM的除法运算优化策略(01-14)