小功率永磁同步电机无速度传感控制器
IRMCF341:
IRMCF341 是IR 公司新推出的针对家用电器永磁交流电机应用的正弦波单片控制集成电路。与传统的单片机或DSP 方案不同的是,IRMCF341 通过专有的电机控制引擎(MCETM)提供了完善的永磁同步电机无传感器闭环控制算法。电机控制引擎(MCETM)包含了所有的电机控制要素、电机外设、专有的运动控制时序发生器以及用于交换数据的双端口RAM。IRMCF341 还具有一套专有的模数混合电路来实现单电阻电流采样以及电机电流重构算法,只需要一个直流负母线上电阻就可完成电机电流采样和重构,大大简化了系统设计并降低了系统成本。
IRMCF341 的另一个特点就是不需要用户编写电机控制程序,用户可以通过一个专用的图形编译器在MATLAB/SimulinkTM 环境下以搭积木的方式构建自己的电机控制系统(一般是自定义速度环功能)。IRMCF341 还具有嵌入式的高速8 位8051 核,用户可以很灵活地通过8051 编程来实现时序控制、用户接口、主机通讯以及上层控制任务等系统实际需要的功能。该8051 核可以通过JTAG 口来进行仿真和调试(可使用FS2 公司的ISA-M8051EW 仿真器或支持Mentor 公司M8051EW 核的其它仿真器)。下图是一个基于IRCF341的典型系统结构框图。
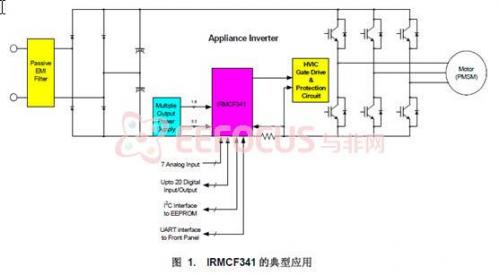
IRMCF341 是针对开发阶段的版本,其48K 的程序存储器为RAM,可以很方便地从外部
EEPROM 载入8051 和MCE 控制代码。批量生产时可以使用引脚完全相同的OTP 版本或掩模版本。
IRMCF341的结构框图:

三、设计内容
本次课题所研究的内容有三个方面:
(一). 电机转速的估计算法
这是本次设计最关键的地方,将研究电机转速的估计方法,如何设计一种实用高效的转速估计算法将是本次课题的核心研究内容。
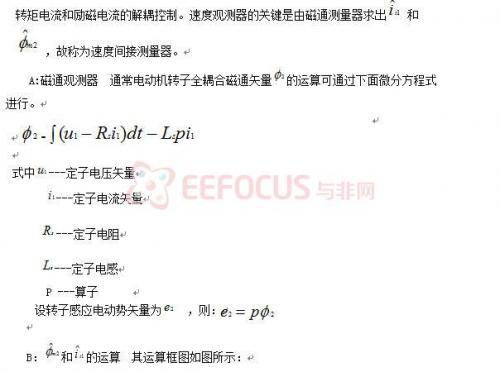
本次设计采用的估计算法是磁通运算法,即利用同步电机的端电压、端电流和电动机的其它参数,通过电动机的理想数学模型直接或间接地计算转速。
在具体介绍该算法之前还需要解决以下两个问题---磁通矢量的观测和电动机参数的误差控制。
1、磁通矢量的观测
为了正确推算速度,磁通矢量的观测是不可少的。本次设计是利用电动机的电压、电流、转速信号及电动机参数,经不同数模运算后,求出磁通矢量。一般采用两类数学模型:
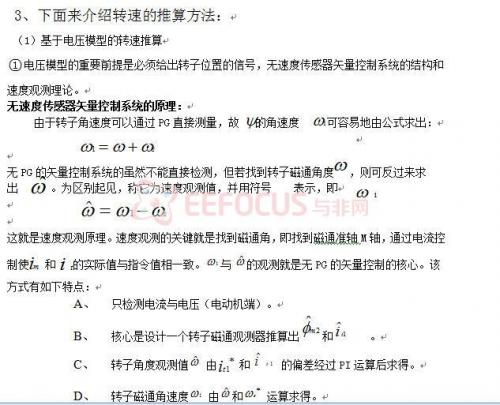
(1)电压模型
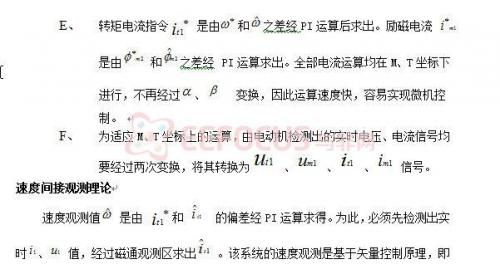
设同步电机在M-T坐标有如下关系:



2、电动机参数的误差控制
利用该方法测量电动机转速,其前提是电动机的参数必须设定正确。若设定值变化,将会影响到推算值的精度。其中参数中影响最大的是定子电阻和转子电阻,它们随电动机温度的变化而变化。
从理论上说,定子电阻和转子电阻均可与转速一起自适应观测器进行观测。可是,从公式来看,在稳态时转子电阻用Rr/S表示(S为转差率),其误差只与转速有关。因此,无速度传感器系统进行转子电阻的自适应观测实际做不到。一般可用下面的公式进行定子电阻自适应调整,转子电阻只能是考虑与定子电阻类似的温度变化函数,进行比例修正。

C:系统单元电路
a:相电压检测
相电压检测由分压电阻、电压检测(绝缘式电压传感器)、滤波电路三部分组成。由于主电路为高压,必须重视主电路和控制电路间的绝缘,选用绝缘性能好的电压传感器。
b:相电流检测
相电流检测采用霍尔式电流传感器,其二次侧接有规定的电阻做负载,这样输出电压与实测电流之间才能呈线性变化。
无速度传感器矢量控制系统参数的自检测
A、参数自检测概述
所谓参数自检测,即利用调速系
- 异步电机无速度传感器矢量控制系统研究(07-01)
- 意法半导体推出开/关/唤醒用单通道触摸传感器控制芯片(03-23)