利用TLE4921-5U设计差分霍尔速度传感器
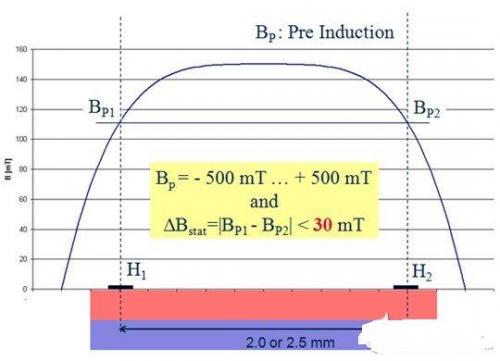
图4:静态差分磁场
ΔBlimit:是指传感器工作时能够正常输出信号所需要满足的最小差分磁场强度。信号在过零点切换时会产生寄生信号。为了抑制这些噪声而不至于输出错误信号,在信号过零点处增加一个2*ΔBlimit的磁滞带,如图5所示,在这磁滞带内的信号都会被当做是噪声而被抑制掉。

图5:噪声抑制
ΔBlimit, early startup:即传感器启动时能够正常输出信号所需要满足的最小差分磁场强度。为了抑制传感器启动时由于振动等带来的噪声,英飞凌传感器引入内部定义磁滞常数,称之为DNC(Digital Noise Constant)。如图6所示,传感器启动时由于振动造成一定噪声干扰,当差分信号幅值小于DNC磁滞常数会被当做噪声抑制掉。只有当差分磁场信号超过DNC磁滞时才会有信号输出。

图6:DNC磁滞概念
5.2磁滞概念
磁速传感器在汽车上有不同应用,如轮速,变速箱速度,凸轮轴和曲轴速度及位置检测等,其应用环境也不同。为了更好适应不同应用,获得更好性能,英飞凌磁性传感器提供灵活的磁滞算法,主要有四种磁滞算法:HF(Hidden Fixed),VF(Visible Fixed),HA(Hidden Adaptive),VA(Visible Adaptive)。
所谓Hidden磁滞概念,即信号在过零点处切换。输入信号幅度很容易受到空气间隙变化的影响,而由于Hidden磁滞切换点在过零点处,从而可以避免受到信号幅度影响,所以Hidden磁滞算法可以获得最佳的相位精度。
所谓Visible磁滞概念,即信号在额定磁滞带上切换。对于齿距较长的目标轮,选用Visible磁滞算法,可以获得比较稳定的输出信号。
图7是典型的60-2齿的凸轮轴应用,在目标轮长槽处,由于差分式霍尔传感器两个霍尔探头检测到的磁场强度一样,因此会有很长一段差分磁场强度ΔB为0,在信号处理过程中,如果选用Hidden磁滞算法,容易导致输出信号相位抖动。而选用Visible磁滞算法,输出信号比较稳定。

图7:Hidden和Visible磁滞比较
所谓Adaptive磁滞概念,即其磁滞水平受输入信号幅度影响。选用Adaptive磁滞算法,一定程度上能够起到振动抑制作用。
所谓Fixed磁滞概念,即磁滞水平为一定值。
6.数据分析及产品选型
将采集到的数据结合传感器算法以及规格书中参数,便可以很容易地从英飞凌霍尔速度传感器系列中选择合适的产品。
英飞凌传感器规格书中并没有列出传感器最大允许工作气隙,这是因为最大工作气隙会受磁场强度,温度,目标轮,转速等因素影响。通过TLE4921-5U可以采集到差分磁场强度ΔB,当满足差分磁场幅值ΔB>ΔBlimit(或者差分磁场峰峰值ΔB>2*ΔBlimit)时,传感器才能够输出信号。也就是说当差分磁场幅值为ΔBlimit时,此时目标轮到传感器模块之间距离即为传感器允许最大工作气隙。
TLE4921-5U能够真实反映目标轮情况,目标轮上加工槽或缺陷等会影响磁场信号,可通过选择带有振动抑制算法的产品以抑制噪声,确保信号的准确性。根据采集到的噪声的差分磁场强度幅值ΔBnoise,结合传感器芯片规格书中参数,满足最小差分磁场强度幅值ΔBlimit>ΔBnoise的芯片可以起到抑制噪声左右。
另外算法方面简单地说,如果对于齿距较小目标轮,系统要求相位精度较高,可选择Hidden磁滞算法。而对于齿距较长目标轮,为了保证比较稳定的输出信号,可以选择Visible磁滞算法。对于振动环境比较恶劣需要传感器有增强的振动抑制算法时,可以选择Adaptive磁滞算法,如果信号幅值跳动比较大需要获得较稳定输出,可以选择Fixed磁滞算法。