利用TLE4921-5U设计差分霍尔速度传感器
1.概述
霍尔效应是常用的传感器感应技术之一,在汽车领域可以用于检测速度,角度,位移等。其中速度检测通常用差分式霍尔传感器。
速度传感器在设计时除需要满足系统电气要求外,还需要结合其实际使用环境如目标轮齿距,磁场强度,是否需要振动抑制算法,转速范围等。因此要设计好一款适合该系统应用的传感器,采集目标轮信息是很有必要的。
本文介绍如何利用TLE491-5U产品特性进行目标轮信息采集,通过分析传感器差分磁场信号,并结合传感器算法来选择适合应用的产品。
2. TLE4921-5U介绍
TLE4921-5U是基于霍尔原理的差分速度传感器,具有高灵敏度以及优异的温度稳定性和对称的阈值以实现稳定的占空比,通过测量磁通量的变化来检测目标轮的运动以及参考位置,可用于转速测量如轮速,变速箱速度,曲轴速度等。
如图1所示,TLE4921-5U主要由电源调整电路,霍尔探头,差分放大器,偏差补偿滤波器,施密特触发器以及集电极开路输出组成。
TLE4921-5U霍尔探头之间距离2.5mm,差分霍尔探头检测到磁场变化并产生差分信号,差分信号包含直流信号以及交流信号,差分信号经过高通滤波器及外部电容处理后可以消除直流偏移分量,交流信号通过比较Bop和Brp来控制开漏极电路的开通和关闭。
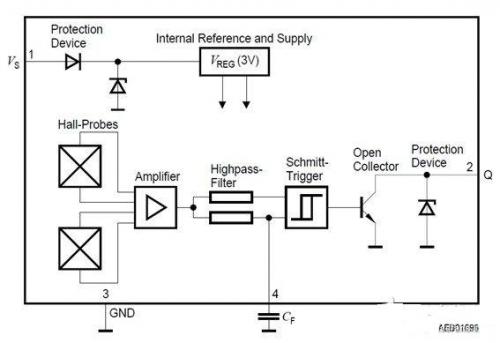
图1:TLE4921-5U系统框图
如图2是霍尔速度传感器差分信号产生及处理示意图,集成在芯片背面的磁铁提供传感器工作需要的恒定磁场,对于霍尔效应传感器,常用的背磁磁性材料主要有NdFeB,SmCo等稀土材料。当两个霍尔探头检测到相同磁场强度时,无论磁场强度强弱,其差值均为零,此时差分霍尔传感器感应到的信号为零。当两个霍尔探头检测到磁场变化时,便产生差分信号。差分信号幅值受差分磁场强度影响,差分磁场信号越强,则产生的差分信号越强,反之越弱。信号处理过程中,当差分信号超过ΔBrp时,集电极输出电路关断,此时输出端被上拉电阻上拉至电源电压,输出为高电平。当差分信号小于ΔBop时,集电极输出电路开路,此时由于集电极内阻远远低于上拉电阻,输出端被拉低到地,输出为低电平。
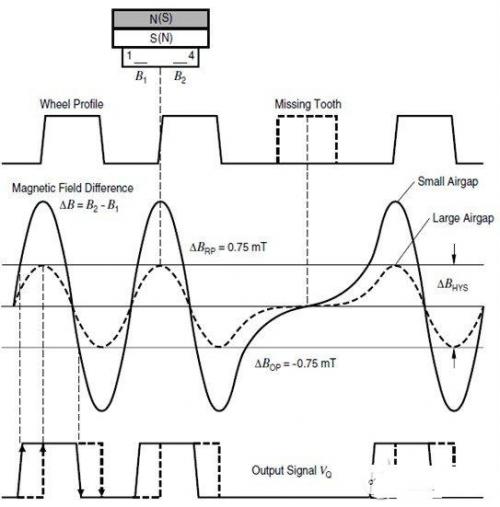
图2:传感器信号产生及处理
3.应用电路
前文已经谈到在信号处理过程中,芯片内部集成的高通滤波器,利用外部电容,通过一个时间常数后将差分信号调整到零点。因此当TLE4921-5U作为速度传感器使用时,外部滤波电容起到信号处理作用,电容异常将会影响到切换阈值,最终影响到数字输出信号。当TLE4921-5U用于传感器差分模拟量信号采集时,则不需要使用该滤波电容。
如图3为TLE4921-5U用于采集传感器差分信号的应用电路,管脚定义从左往右分别为电源,输出,地以及参考电容端。传感器1脚电源端和3脚地之间连接12V电源,2脚输出端悬空,4脚参考电容端不接电容,示波器差分探头连接参考电容端及地,用于测量差分信号。选择阻抗大于10兆欧姆的差分探头,同轴电缆尽量短,使用稳定可靠电源。
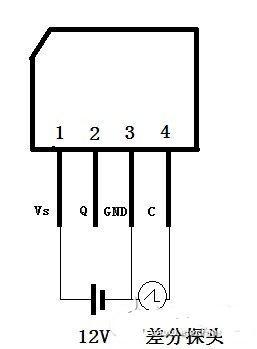
图3:TLE492-5U测试电路
4.数据处理
如表1,标准的TLE4921-5U灵敏度为-5mV/mT,在零磁场或者差分磁场ΔB为零时,直流偏置电压为2V.示波器测得的电压正比于霍尔传感器感应到的差分磁场强度,数据中包含直流分量和交流分量。因为传感器基于差分原理,所以直流分量和磁场偏磁无关。只有交流信号才反应目标轮移动。
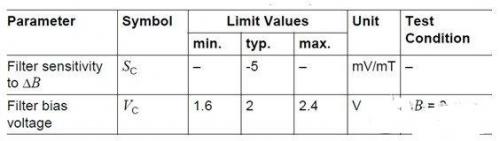
表1:TLE4921-5U参数
测试时建议使用英飞凌标定好的TLE4921-5U,以保证芯片灵敏度及直流偏置电压在标称范围,从而采集到较理想信号。测试时可以在不同温度条件(如分成常温,高温和低温)以及不同转速下测试目标轮在不同气隙下信号表现。为了便于分析同一目标轮在不同气隙下表现,可将转速台架电机的触发信号作为示波器信号采集的触发信号,从而确保采样信号都是从同一个起始点开始采集。信号采样时尽量保证采样到一个完整周期的目标轮信号,以确保信号准确性。
最后将采集到的信号从示波器中导出到表格中编辑,此时采集到的是差分霍尔电压,并且包含直流信号和交流信号。处理数据时需要去除掉直流信号,并将交流霍尔电压信号转换成差分磁场信号。结合表1的参数,假设差分霍尔电压为V,则差分磁场信号:
式4-1
通过上述步骤,便可以采集到需要的差分磁场信号。通过分析差分磁场信号,我们能够获悉目标轮信息(如轴向跳动,齿距对信号影响,加工槽对信号影响等),不同气隙下信号表现(如最大气隙,最小气隙表现等),信号干扰情况,差分磁场信号强度等。
5.参数解释及磁滞算法介绍
在分析数据之前,先简单介绍下几个参数以及传感器磁滞算法,以便更好理解传感器并选择合适产品。
5.1参数介绍
BPre-induction:是指背磁磁铁的磁场强度,在英飞凌规格书中,差分式霍尔传感器可工作在磁场南极或者北极,其背磁磁场强度范围在-500~500mT,传感器工作在更大的磁场强度下不会造成传感器的损坏,其背磁磁场强度会直接影响传感器气隙表现。
ΔBstatic:是指在零磁场强度或者均匀磁场强度下差分霍尔探头感应到的差分磁场强度,对于英飞凌差分霍尔速度传感器一般要求ΔBstatic 小于30mT,如图7所示,传感器芯片里两个霍尔探头距离为2.5mm(TLE4941PlusC为2.0mm以便更好适应较小齿距的轮速传感器应用),应用时需满足ΔBstatic=|Bp1-Bp2|<30mT。如果ΔBstatic大于30mT,可能造成输出信号占空比不良。为了减小静态差分磁场强度,对于背磁感应方式,传感器设计时可在背磁和传感器之间增加导磁片,这样可以使得磁场分布更加均匀,从而减小两个霍尔探头之间静态磁场强度差异。