基于DSP控制的数字移相器—变压变频器模块的设计
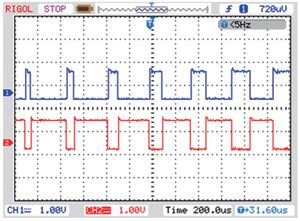
的5.1V反压,当PWM输出高电平,IGBT的CE两端电压差为8~9V,使IGBT导通;当PWM输出低电平,IGBT的E极的5.1V反压可以保证IGBT可靠关断。 ② 三相逆变桥SPWM驱动的设计 图9 TLP250光耦直接驱动IGBT 系统启动后,设置输出调制正弦波频率为50Hz(±0.01Hz),死区时间4.0μs时的SPWM经过74HC244N缓冲驱动后波形如图10所示,死区时间如图11所示,以上桥臂1(PWM1)和下桥臂4(PWM2)为例,上下对称,其中CH1通道观测PWM1,CH2通道观测PWM2。 图10 EVA事件管理器输出的SPWM波经过光耦驱动后的SPWM波形 由DSP的EVA事件管理器输出的SPWM波经过光耦驱动后的SPWM波形见图10。 IGBT逆变桥上下桥臂波经过光耦驱动后死区时间情况如图11所示。 图11 EVA事件管理器输出的SPWM波经过光耦驱动后死区时间情况 2 A/D转换采样电路的设计 如图12所示,输入端电压为Vin,输出端电压为Vout,有:VOUT=K3(R2/R1)VIN,其中,K3=1+0.05。一般取R2=R1,达到只隔离,不放大的目的。 输入VIN=0~12V,输出等于输入,采用LM324运放集成芯片,电路如图12所示。 图12 线性光耦隔离电路 由于光耦会产生一些高频的噪声,通常在R2处并联电容,构成低通滤波器,取C=10pF,有微小相移,约1.5kHz-0.2°,可以忽略。电阻R1和R2采用精密电阻,以达到最好的线性关系1:1。 采样电阻分压后,通过高精度线性光耦隔离,采样信号Vout经过一级电压跟随器后,输入ADC,经ADC模块转换为数字量,进行PID运算处理后,输出给调节量。 3 过流、过压保护单元设计 图13 过流保护电路图 过流保护的整定值可以通过改变R8来调节,当IIN-IOUT的电流超过整定值,电路输出端送给处理器(DSP)或逻辑控制电路一个高电平信号(+5V),最终由控制回路调整主回路设置(如断电),从而实现过流保护。 ② 过压保护单元设计 实验及结果分析 逆变输出接三相阻性负载。 过流保护测试: 部分实验波形见图14和图15。 图14频率设定为50Hz时的逆变输出三相负载线电压波形 图15 频率设定为60Hz时的逆变输出三相负载线电压波形 ① 实验结果表明,频率输出略有误差(+0.01Hz),但基本满足要求。输出频率的误差可能是由于DSP在进行浮点运算时,浮点比较没有绝对相等,只能无限逼近。 ② 无源LC滤波只有一个中心频率,当输出频率改变时,中心频率不能跟随变化,使输出波形稍有畸变。 ③ 在进行输出频率(60Hz)或者直流电压设定后运行时,可以看到,输出频率或者输出直流电压逐渐上升达到设定值,以减小启动时的冲击电流;当系统停止时,输出频率或者输出直流电压逐渐下降为0。 实验证明,设计方案可行,系统性能和各项指标基本满足设计要求。
TLP250光耦驱动能力比较大(Io=±1.5A)可以直接驱动中功率IGBT,本文已在上节作了详细说明,在此不再赘述,具体驱动电路如图9所示。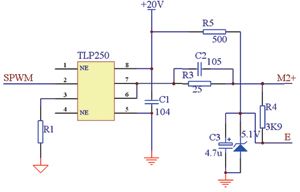

本设计选用Agilent公司的HCNR200/201。线性光耦真正隔离的是电流,要想真正隔离电压,需要在输出和输出处增加运算放大器等辅助电路。
① 过流保护单元设计
过流保护电路如图13所示。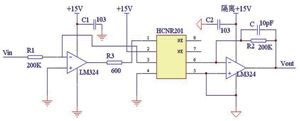
过压保护电路的基本原理和过流保护基本想同,唯一不同的是过压保护电路不需要电流互感器,将LM393第二引脚直接与分压采样电阻想连。这里不再赘述。
频率输出设定为50~100Hz时的测试结果如表1所示。
设定输出门限直流电流为7.00A。保护电压电流分别如表2所示。
- 基于OV6630图像传感器和DSP的图像采集系统设计(06-16)
- 轨道车辆电动自动门控制系统开发(07-29)
- 用于海洋搜救的多片DSP图像处理识别系统的实现(06-30)
- 基于dSPACE的双绕组感应发电机实时控制系统研究(08-11)
- 基于DSP的运动控制器的研究与开发(10-30)
- 基于ADS1274的可控式高精度数据采集系统(01-07)