基于ADNS2610的微型飞机速度检测系统设计
0 引言
微型飞机的飞行速度在其飞行过程中不仅是被控量,同时也是是对飞行姿态进行控制的重要参考数据之一,因此有必要对这个数据进行精确测量。特别是在近地飞行过程中,对飞行路径、避障能力、降落速度等要求更为严格,因此对飞行速度进行精确测量显得尤为重要。目前对微型飞机的飞行速度的测量一般有以下几种方法:
(1)基于惯性传感器的方法。通过对加速度积分来获得速度数据。但由于惯性传感器存在零点漂移,积分过程也存在误差,长时间使用会有很大的积累误差。因此,在使用的过程中必须使用其他测量方式对零点漂移和积分积累误差进行校正。
(2)基于GPS的方法。此类方法需要借助外部设备,一般都比较昂贵,并需另行安装其他定位参考点。因此在测量过程中,测量精度受定位方式限制,使用环境受限。
(3)基于空速计的方法。空速计一般使用在飞行速度较高的场合,易受气流影响,测量结果并非是飞机相对于地面的速度,而只是相对于大气的速度,因此后续处理过程复杂。
(4)基于光流法测速。这是一种直接测量微型飞机飞行速度的方式,测量精度高,不存在积累误差,而且不需要借助于外界的定位工具。但是光流法测速一般需要使用图像传感器、数字信号处理器等硬件设备,结构复杂。在高空环境下,光流法测量误差也较大。本文针对低空飞行环境,以集成了图像采集电路和数字信号处理器的ADNS2610为传感器,设计了结构简单,成本低,体积小,重量轻的微型飞机速度测量系统。为了简化设计,本文检测的是微型飞机在飞行高度不变时的水平飞行速度,因此本文设计的飞行速度检测方式只能是其他的飞行速度检测方式的一种补充。
1 系统原理和整体方案设计
该测速系统的工作原理是光流法。由于采用的传感器芯片ADNS2610集成了图像采集功能和数据处理功能,传感器的输出数据就是图像的位移量Delta_X和Delta_Y,其中Delta_X是图像在X方向上的位移量,Delta_Y是图像在Y方向上的位移量。将位移量Delta_X和Delta_Y除以位移时间T,就得到图像的移动速度:

式中:VX1是指图像在X方向上的移动速度;VY1是指图像在Y方向上的移动速度。将图像的移动速度乘以高度系数a,就可以得到微型飞机的移动速度,即:

式中:VX和VY分别指微型飞机在X方向上和Y方向上的飞行速度;a的值等于透镜和地表之间的距离H与透镜和感光面之间的距离h之比,即a=H/h,高度H通过超声波测距的方式测量得到,其测量精度会对VX和VY的计算精度产生影响。
系统主要包括硬件电路部分、用于支持图像采集的透镜系统以及软件部分。硬件电路部分主要是支持传感器的系统电路以及与传感器进行通信的接口。透镜系统部分主要用来使光学传感器获得需要的图像数据。软件部分主要用来获取位移信号和计算微型机飞机的飞行速度。
2 硬件电路设计
2.1 芯片介绍
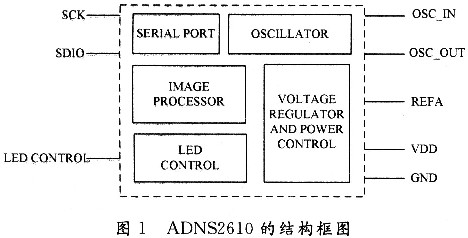
本文采用的传感器芯片ADNS2610主要用于光电鼠标。它集成了图像传感器和数字信号处理器,以及输入输出数据的串行接口,可以直接输出X和Y方向上的位移量。这种传感器采用光学导航技术,通过检测到的图像的移动变化来计算得到传感器的移动方向和距离。如图1所示,芯片主要包括串口、振荡器、图像处理器、电源管理、LED控制等模块。把图像传感器和数字信号处理器结合起来是本传感器的一大特色,使得结构大大简化。集成度更高,也更加紧凑。
ADNS2610的主要特征如下:
(1)精确的光学导航技术;
(2)小巧紧凑的结构(10 mm×12.5 mm的引脚);
(3)二维运动量的检测;
(4)简单通用的控制器接口;
(5)高达12 inch/s的运动检测;
(6)400 cpi的解析度;
(7)高可靠性;
(8)高速运动传感器;
(9)串口寄存器。
2.2 电路设计
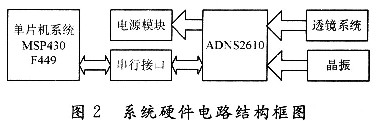
图2是该系统的硬件电路结构框图。微型飞机的飞行控制系统的主控芯片为MSP430F449。
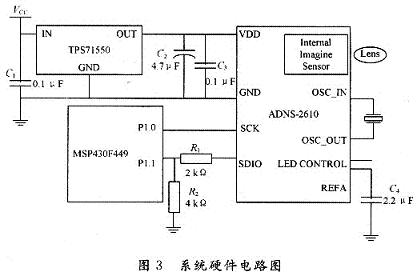
整个系统的硬件电路如图3所示。其中SDIO是串口数据输入/输出端口;SCK是串口的时钟端口。时钟信号由主控制器MSP430F449发出。当向SDIO端口写入读/写地址以后,数据就通过这个端口写入或读出。ADNS-2610的输出电压为5 V,而MSP430的I/O端口输入高电平最高为3.6V,因此要对ADNS-2610的SDIO输出电平降压,使之符合MSP430对输入电平的要求。如图3所示,通过外接分压电阻的方式降低ADNS-2610的SDIO端口的电压。ADNS-2610的SCK端口只接收时钟信号。ADNS-2610接收的高电平信号电压范围是2~5 V,而MSP430输出的高电平信号为3V,符合ADNS对高电平的要求,因此不用考虑电平的调整。
3 透镜系统设计
透镜焦距的选择对于整个系统的设计至关重要,因为它决定了微型飞机在使用本测速系统时的高