异步电机无速度传感器矢量控制系统研究
时间:07-01
来源:现代电子技术 陈世军 高军礼 邓则名 黎国才
点击:
无速度传感器矢量控制仿真系统所采用电机的参数为:Pn=2.2 kW,Rs=O.435Ω,Rr=O.816Ω,Lm=0.0693H,L1s=L1r=0.002H,转动惯量J=O.02kg·m2,极对数Np=1。电机空载运行,初始给定速度为120 rad/s,当t=O.5s时,改变速度为60 rad/s。在启动时,当t=O.1-2s时,转子转速就达到了稳定,当给定速度在t=O.5s时发生变化,转速输出在t=O.56s时再次达到稳定,仿真结果如图5所示。
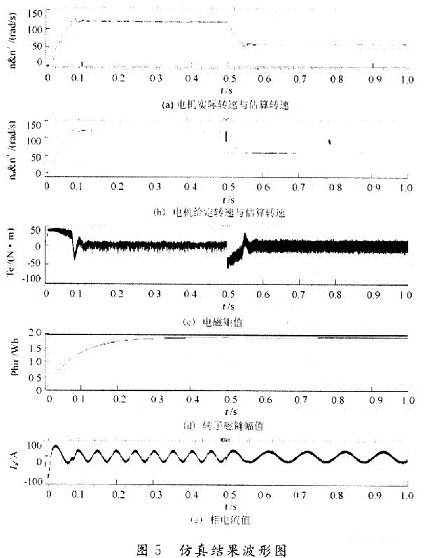
从仿真结果图可以看出该系统具有良好的动态性能,能实时跟踪电机实际速度的变化。
4 结语
基于MRAS方法构建异步电机转子转速辨识模型,与SVPWM技术相结合,在Matlab/Sireulink环境下设计出异步电机无速度传感器矢量控制系统。通过计算机仿真,验证了该系统能够实时辨识电机转速,具有良好的动态性能,对实际工程应用的实现具有一定的理论指导意义。但在电机的实际运行过程中,电机参数会随着运行环境的变化而发生改变,这时电机转子磁链与速度的估算就会不准确,因而在对实际系统的应用研究中,有必要对转子电阻进行在线辨识,从而准确估算出转子磁链与转速。为了提高无速度传感器控制系统的性能,对电机参数进行实时辨识是今后研究的一个方向。
- 传感器和致动器正成为元器件市场新热(03-12)
- 图像传感器市场突破60亿美元,CMOS将占主导地位(05-22)
- 超低功率“智能尘埃”创新无限,无线传感器技术继续高歌猛进(05-22)
- 电化学气体传感器核心技术见突破(05-26)
- 日本工业机器人选中Cognex视觉传感器作为标准组件(04-14)
- 欧姆龙索能发力通用传感器市场,上海成立合资公司(05-08)