十年潜心修行,Leddar超大量光学雷达技术已经吊爆?
由加拿大魁北克国家光学研究所(INO)发明、LeddarTech公司持续开发和商业化的Leddar光学飞行时间(ToF)感测技术,藉由将速度快且解析度极高的类比数位转换技术与创新的讯号处理方式结合在一起,可打造出性价比更高的新一代光达(LiDAR)感测器。
Leddar光学飞行时间感测技术最初是由位于加拿大魁北克城的国家光学研究所(INO)发明,后来经过LeddarTech公司持续开发和商业化,是光学感测领域中的一项独特技术。Leddar光处理技术将速度快且解析度极高的类比到数位转换技术与创新的讯号处理方式结合在一起,从而将时域处理的优势应用于光学飞行时间感测领域。
遥测技术复杂度大不同 测距应用挑战性最高
遥测技术是指在没有与物体进行物理接触的情况下,透过物体附近的感测器而获得这个特定物体的资讯。包含汽车辅助驾驶、机器人导航、交通管理和液位感测在内的无数应用,都得益于这项技术。
遥测技术可发展出多种不同的应用,可粗略地分成存在或接近感测、速度与距离三大类。
.存在探测或接近探测:只关心某个物体是否在一定的区域范围内存在,至于其他资讯则不需要感测。安检应用就是其典型范例,就技术复杂度而言,这是一种最简单的遥测应用。
.速度测量:不需要知道物体的确切位置,但是要获得物体的精确速度,其典型的应用领域是交通执法
.测距:须精准确定物体相对于感测器的位置,是三大类应用中最复杂的一种。
本文将集中介绍测距技术。这种技术基于所获得的物体位置资讯,可以推断出物体的存在情况与行进速度,因此可被广泛应用于所有遥测应用。
透过摄像机图像的立体三角定位这类被动技术,我们可以获得物体的距离资讯,但是这些被动技术的能力通常有很大的局限。例如立体三角定位技术只有在物体的轮廓非常清晰的情况下,才能透过匹配演算法获得距离资讯。
因此,测量物体位置最常用的技术多半包含以下几个步骤:向被测物体发送能量,收集回波信号,然后再对这个回波信号进行分析,以判断感测器视野范围 (FoV)内的一个或多个物体的位置。由于能量是被特意发送到被测物体,因此我们将这类技术称为"主动"技术。
在这些主动技术中,有些技术要依靠回波的几何位置,才能推断出位置资讯。例如结构照明技术包含向被测物体投射一排点阵列,然后使用摄影机和图像分析方法对这些点在物体上的几何离散情况进行分析。还有一些技术要依靠回波的时间特性判断被测物体的位置。这类技术一般被称为"飞行时间(Time of Flight)测量"技术。
飞行时间测量的具体方式不同,可以通过无线电波(雷达)、音波或超音波(声纳)或光波(光学雷达)完成。
图1列出了当前存在的不同遥测技术。本文将聚焦说明以光波为基础的光学飞行时间测量技术。
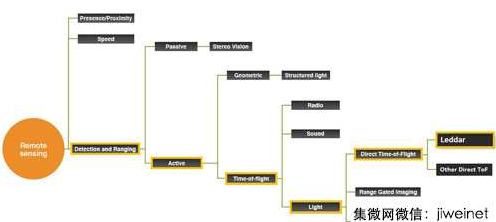
图1 遥测技术分类
三大传统光学飞行时间测量方法各有限制
光学飞行时间测量根据光波在感测器与物体之间的往返飞行时间计算从感测器到物体之间的距离。由于光速在正常温度和气压范围内不会发生什么变化,而且其数量级要比被测物体的速度快,因此光学飞行时间测量是以无接触方式,精确地测量从感测器到物体之间距离的最可靠的方法之一。
一般光学飞行时间测量可被分为三大类别:直接飞行时间、距离选通成像(Range-gated Imaging)及相位检测。Leddar则是一种可以进行飞行时间测量的新颖、独特技术。下面将说明每种测量技术的操作原理。
直接飞行时间
在直接飞行时间测量方式中,要发射一个离散脉冲,而且要使用一个或多个计时器,基于阈值检测,测量发射脉冲与回波之间的时间差。根据以下公式,可以将这个时间差直接转换为距离。
 ……方程式1
……方程式1
C代表光速,在真空中为每秒2亿9,979万2,458公尺。除以2是因为光的传播过程是从感测器到物体,然后再从物体返回到感测器,而感测器到物体之间的距离是这个光程的一半。
进行直接飞行时间测量的难度在于时间间隔的测量。为了将距离值精确到公分等级精度,计时器的精度需达到67皮秒(ps)。如果要在数位逻辑中实现,就需要15GHz的时脉速度。要做到这点显然不太现实,因此这种量测方法通常要搭配各种时间到数位的转换方式。
图2是直接飞行时间量测的讯号波形,脉冲的上升沿和下降沿通常用于保持测量的精度。在测量中不用考虑不同的回波波幅。
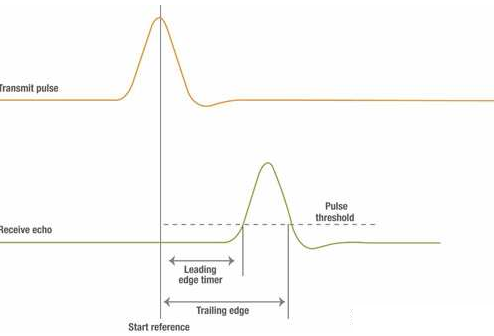
图2 直接飞行时间量测所得的讯号波形
距离选通成像
直接飞行时间需要通过测量接收信号的即时值来实现,而距离选通成像一般则是透过CCD或CMOS影像感测器的讯号积分而来,如图3。
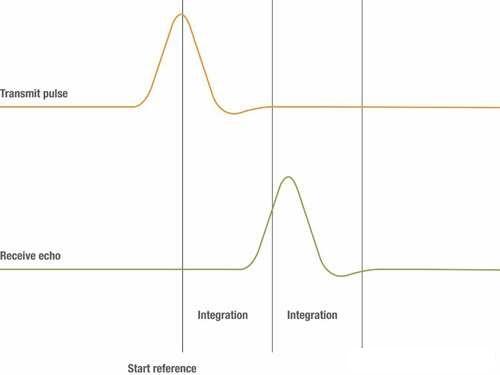
图3 距离选通成像
- 用“免触控”的方式实现人机交互,这种超音波飞行时间传感器怎么办到(04-17)
- 迈来芯发布面向挑战性环境中ToF三维视觉的芯片组(01-19)