基于卡尔曼滤波器及多传感状态的融合估计算法介绍
时间:06-30
来源:3721RD
点击:
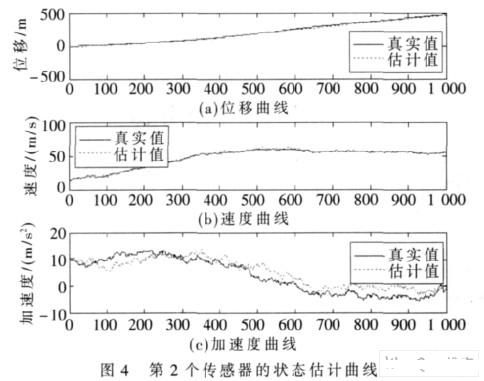
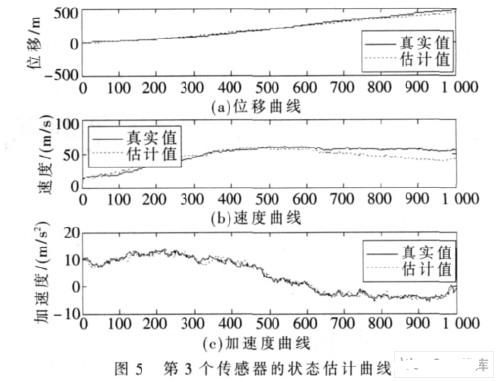
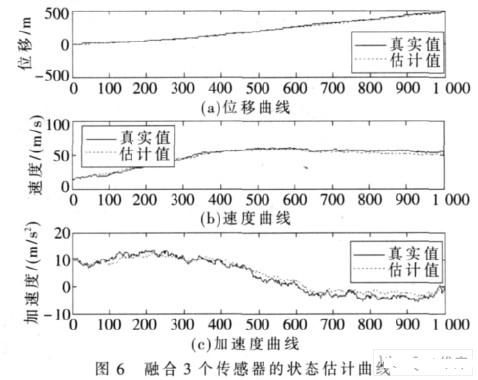
信息融合技术具有提高系统的可靠性和稳定性等优点, 状态融合估计是其中研究热点之一。本文将基于Kalman 滤波的多传感器状态融合估计方法应用到雷达跟踪系统, 仿真实验表明, 融合3 个传感器的信息所获得的状态估计误差小于利用任何单传感器进行Kalman滤波得出的状态估计误差, 因而本方法对雷达系统的跟踪是很有效的。本方法可推广用于组合导航、信号处理、图像处理、故障检测与容错等应用领域。
- 意法半导体(ST)荣获计算机世界杂志所颁发的荣誉奖项(05-30)
- 技术分析:深度解密多传感器融合系统(11-24)
- 多传感器集成单芯片,智能化从这里开始(02-25)
- 最小的意法半导体(ST)MEMS模块让时尚纤薄的消费电子产品更具灵性(11-28)
- 一种有效的异质多传感器异步量测融合算法(08-01)
- 9个基于多传感器的经典应用方案设计(10-26)