基于WiFi的远程视频传输智能机器人设计
相应操作。而连接上位机和下位机之间的纽带就是通信协议,软件部分包括通信协议,客户端控制软件和下位机软件。在此主要介绍通信协议和上位机的开发。
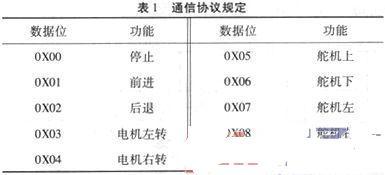
3.1通信协议上位机采用数据包格式传送指令,也可以采用单字符的形式发送,由于单字符通信方式干扰较大,因此采用数据包格式传送指令,包头用OXFF,包尾用OXFF,无校验位。上位机利用无线网卡通过Socket发送数据包到路由器,路由器通过解包机制把数据包解开,通过串口发送到单片机并通过控制模块执行相关操作。其协议规定如表1所示。
3.2上位机软件
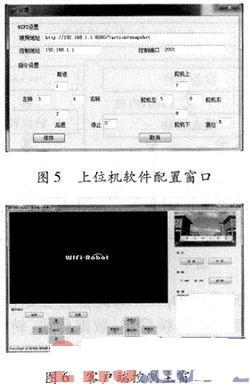
对于控制平台,文献给出了一种基于Windows CE.net技术的方法,文中使用Visual Studio2010编写C#上位机客户端。采用TCP/IP协议,利用Socket发送数据包到路由器。客户端包括两个窗口:主窗口和配置窗口。主窗口包括视频显示区及控制按钮区,主要用于显示回传视频和实现机器人运动控制。配置窗口主要完成WiFi无线网络及机器人控制指令自定义键值的配置。配置窗口和主窗口分别如图5和图6所示。
根据表1的通信协议,上位机通过Socket以Byte打包的方式向机器人发送控制命令,同时接收摄像头回传视频流并在视频显示区实时显示。视频部分也可将摄像头拍摄的视频分解成一张张独立的jpg图片发送到客户端,客户端再将图片组合成视频。对于Socket数据发送,首先创建Socket对象的实例,创建Socket实例后上位机即可通过Connect方法连接到路由器,并通过Send方法路由器发送数据。数据发送完成后用Close方法关闭Socket以释放资源。
除此之外,采用配置文件的方式来存取上一次配置的数据,以免重复配置,并通过定义8个键盘值,便于观察事件的执行,以此可方便地通过键盘的触发事件实现电机和舵机的全方位移动,且增加了拍照和车灯控制命令,经测试上位机软件运行良好。
3.3下位机软件驱动板微处理器采用STC公司的STC89C516芯片。STC89C516单片机是宏晶科技推出的新一代超强抗干扰、高速、低功耗的单片机,指令代码完全兼容传统的8051系列单片机,这为很多嵌入式控制系统提供了一种灵活性高且成本低的方案。下位机程序主要包括:外部中断、舵机PWM中断、定时器、串口中断、初始化等。下位机程序接收来自路由器转发的上位机命令,实现数据接收、摄像头云台全方位控制、电机转向、车灯控制、电池电量指示、红外壁障等功能。
4结束语
经过实际调试运行,WiFi Robot的实际控制距离可以达到100 m.WiFi Robot具有实时视频传输、人工自主控制、红外壁障等功能。实物如图7和图8所示。
在目前所设计机器人的基础上,也可以对系统的功能进行拓展,如加载多自由度机械臂、GPS定位、超声波测距、外网控制等,则可实现全方位、超远距离控制,并广泛应用于险情探测、图像采集、目标定位、无线通信等领域。
更多关于WIFI的技术资讯,欢迎访问 技术专区
- 宋俊德:3G不可能等WiMAX成熟后再上马(08-23)
- 孙震强:质疑“WiFi生存能力低下论(08-28)
- WLAN欧标、国标与WiFi的双重标准(08-29)
- WiMAX寻找商业定位 中兴华为借力提升地位(08-23)
- Wi-Fi协议应用消费电子产品 预计将有大发展(08-29)
- 阚凯力力挺WiFi:3G运营模式必然失败(11-15)