基于TMS320LF2407的运动相机控制系统设计
时间:07-24
来源:互联网
点击:
控制系统程序由主程序、子程序和中断子程序组成,主程序完成系统初始化及各变量的初始化,子程序完成各控制面板的扫描,中断子程序实现控制面板上各参数设定的功能 。相机控制流程图如图4所示。
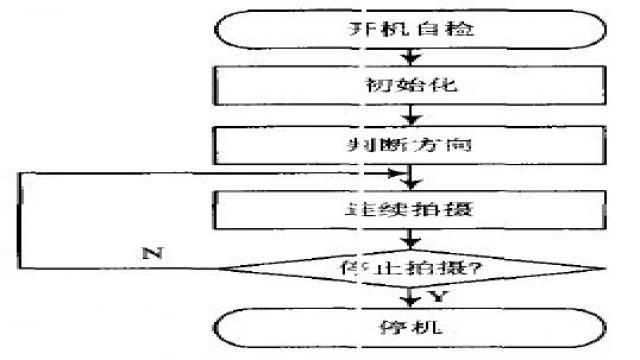
图4 相机控制流程图
由 于TMS320LF2407通过I/O 口和驱动器连接,需要对接口初始化定义,IOPC5被配置为基本功能方式;PWM3 IOPB2,IOPB5被配置为通用I/O 方式;IOPC5被配置为通用I/O方式;在步进电机驱动程序设计中,充分运用TMS320LF2407控制器的事件管理模块。在 TMS32OLF2407中各有一个16位比较寄存器CMPRx(x=4、 5、6),每个比较寄存器各有两个比较PWM 输出引脚,产生3路PWM 输出信号,控制电机转速(位置),其输出引脚极性将由控制寄存器(ACTR)的控制位来决定,根据需要选择高电平或低电平作为开通信号。在PWM 后号调制中需要周期一定的载波,这时用到了定时器3,它以内部CPU 时钟作为输人,工作于连续增/减计数模式下,产生PWM 脉冲输出,产生的脉冲为一个环形可变脉冲,这时由T3PR定时周期下溢和上溢时产生中断,刷新周期值,进行PWM 调整。
4 结语
本 文使用数字信号处理器TMS320LF2407通过驱动步进电机驱动器ASD18A-K,和嵌入式DSP控制程序来驱动ASM46AK-H100的谐波减 速步进电机以实现对运动相机的控制,通过实验室模拟实验、现场实际操作和数据测试,该控制系统的设计达到了预期的要求。
- 单片式降压型稳压器为DSP提供片内电源排序(01-09)
- 什么是PCI总线?其接口芯片的应用(01-26)
- 功率分配系统(PDS)设计:利用旁路电容/去耦电容(04-29)
- 具有多个电压轨的FPGA和DSP电源设计实例(05-22)
- 具有多个电压轨的FPGA和DSP电源设计实例(二) (05-22)
- 基于DSP和CPLD的移相全桥软开关电源数字控制器(06-02)