直流电机专用伺服驱动电源设计
概述
该设计以DC-DC变换器为核心,实现220V市电至+60V/20A的电源转换。电源设计中采用功率因数校正技术,提高了有功功率;特别是电源设计了微机控制接口,与随动系统同步工作,并实现了上电时序控制,确保+60V电压相对低压输出滞后上电。采用多重滤波措施和双绞线输出方式,有效降低输出电压纹波,提高电源输出质量;具备完善的自保护功能和监控检测功能,提高了电源的安全性和可靠性。
电源设计
系统结构
220V交流电压经整流和滤波后得到320V左右的直流电压,加至电源模块输入端。单DC-DC模块的最高输出电压一般为+48V,要得到+60V的直流输出电压,必须采用模块串联的方法得到。设计采用两块PH600S280-28 DC-DC模块(调至+30V输出),通过串联得到+60V的输出电压,如图1所示。

图1 模块串联方式
快恢复二极管D1、D2为串联方式中的保护器件,要求D1、D2反向耐压大于两倍的电源额定输出电压,电流大于两倍的电源额定输出电流,正向导通压降应尽量小。由于是采用两个电源模块串联构成电源系统,在一个有限制的封装内完成设计有一定困难,有的模块串联方案采用两个封装完成设计,即设计两个30V 的独立电源,再进行外部串联构成+60V电源系统。本设计通过合理配置空间,在电源上下盒盖中各安装一个DC-DC模块,以金属壳体作为散热手段,采用紧凑的设计和安装技术将整个电源系统封装在一个较小的空间内,使整个电源体积、重量大大减小,截面积仅为6×9英寸2,实现了小体积大功率的一体化电源系统设计。
功率因数校正措施
开关电源的桥式整流、大电容滤波电路令整体负载表现为容性,使220V交流输入的电流电压相位产生差异,造成功率因数低下,有功功率下降并产生高次谐波污染电网,因此必须采取功率因数校正(PFC)措施。基于成本控制、电路体积及应用方便等因素考虑,我们采用被动式功率因数校正措施。被动式PFC结构简单,针对电源的整体负载特性表现,在滤波大电容之前串接一个参数适宜的功率电感,这里采用10mH/8A的环形磁心电感。强制平衡电源的整体负载特性,保证功率因数不低于0.8。被动式PFC采用电感等无源元件,工作可靠成本低廉,且无需对原电气设计进行修改,是目前常用的PFC方法。
设计特点与关键技术
微机控制和检测接口
微机控制(图2)功能可以确保+60V/20A电源只在计算机送出使能信号、伺服系统工作的状态下启动输出,平时电源无输出。这种电源与随动系统同步工作的方式,具有省电、低发热、控制灵活等一系列优点。在某装备电源系统的一系列电源中,+60V/20A电源功耗最大,但发热量最小,温升最低,充分证明了电源设计中采用计算机控制接口的优越性。
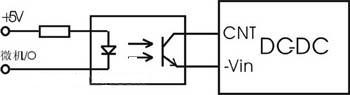
图2 微机控制接口
电源内部还提供针对+60V的微机检测接口,进行开关量方式的实时检测,如图3所示。+60V电压作为检测光耦的输入驱动,光耦输出作为检测口与微机数字I/O口连接。正常情况下检测口为低电平,一旦+60V输出消失或大幅降低,光耦的输出电平将由低到高发生跳变,提供给微机I/O口。
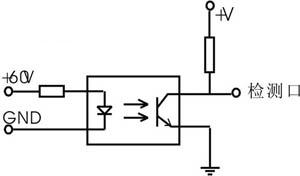
图3 微机检测接口
上电时序控制
直流电机控制系统中存在上电时序问题,一般情况下驱动电压上电速度快,而控制电路电压上电后控制电平的建立需要一定时间。这样如果不进行上电时序控制,在系统上电的瞬间,高压比低压上电速度快,控制电平的建立相对滞后,导致在上电瞬间随动系统失控,电机出现短时间的失控转动,尤其是在双极性控制方式中。传统的解决方法通过设立高、低压开关手动控制上电时序,或是在控制系统中设计上电时序控制电路,这样必然增加了电路的复杂性,造成电路成本增加同时可靠性降低。而在电机驱动电源上解决这一问题,措施简单有效,工作原理为:CNT端为模块使能控制端,可以控制模块的工作状态,作为输出电压的控制开关。通常采用光耦来控制CNT端的状态。只需增加一只光耦,即可解决上电时序问题。如图2所示,光耦输入端由电机控制电路的工作电压+5V控制,这样+60V电源输出必然滞后于低压+5V,实现了上电时序控制功能,从根本上解决了前述问题。
电源保护功能与电磁兼容措施
模块内有过流、过压、过热保护功能,使用外接电位器可在额定输出电压±10%的范围内调节。在电源系统设计中,我们在220V整流后的高压输入端、+60V输出端等关键部位采用TVS浪涌吸收器对电压瞬变和浪涌冲击进行防护抑制措施,以旁路吸收的方式保护了电源系统,同时降低了电磁干扰,提高了电源系统可靠性与寿命。
我们实验测得的+60V输出电压纹波在800mV~1000 mV,明显偏大。通过在电源系统调整端和输出端
- 基于单片机与TC787芯片的三相半控整流电路设计(11-25)
- 无刷直流电机相序测定实用方法(04-08)
- 用于Quad-rotor飞行器的无刷直流电机驱动系统设计(06-09)
- 直流电机好不好,看看驱动电路设计就知道(01-27)
- 一种实用型直流电机控制电路的设计(04-08)
- 基于Motionchip的无刷直流电机伺服控制系统设计(01-04)