无刷直流电机相序测定实用方法
时间:04-08
来源:现代电子技术
点击:
1 引言
无刷直流电机|0">直流电机采用电子换向装置代替了传统直流电机的机械换向装置,又具有与直流电机类似的机械特性,其磁钢置于转子上,通过不断地变换定子绕组通电方式产生旋转磁场驱动转子转动。由于转子采用了永磁体结构,无刷直流电机具有体积小、重量轻、结构简单的特点。随着电力电子技术的发展,无刷直流电机的应用越来越广泛。快速有效地确定位置传感器和绕组间的相序关系是实现无刷直流电机调速功能的关键。
本文通过对三相无刷直流电机传感器位置、输出信号与绕组电动势间的关系进行分析,提出了一种测定其相序的有效方法。
2 无刷直流电机基本控制方法
无刷直流电机的转子磁钢呈瓦片形,磁极与定子绕组间气隙均匀,气隙磁场呈梯形分布。定子绕组感应电动势波形为梯形波。
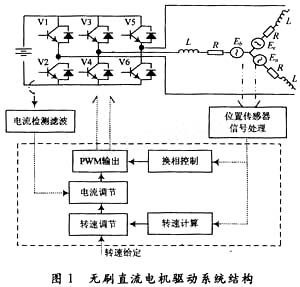
无刷直流电机定子绕组通常采用三相星形接法,需要应用三相全桥控制电路,其驱动控制系统结构如图1所示。
功率管的换相信号需要从位置传感器的状态得出,换相时刻也就是霍尔传感器的信号状态改变的时刻。因此霍尔传感器和三相绕组对应关系的确定对于电机的正确运行非常重要。
3 相序测定的实用方法
3.1 位置传感器安装方式
位置传感器在无刷直流电机控制系统中起着非常重要的作用。它用于检测转子磁极的位置,为开关电路提供正确的换相信息。
无刷直流电机常用的位置传感器是霍尔传感器,霍尔元件数通常与绕组相数相等,转子磁钢作为霍尔元件的励磁磁场磁极。
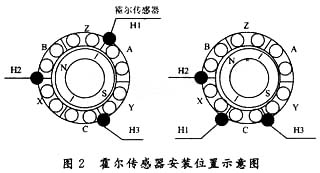
为了产生正确的换向信号,霍尔传感器安装位置有一定要求,通常有120°安装和60°安装两种方式,如图2所示。
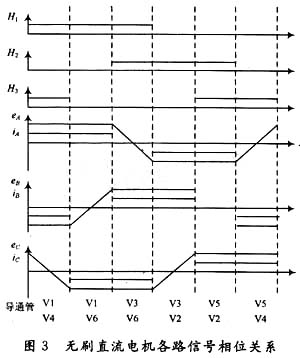
以位置传感器的信号状态区分,将无刷直流电机的运行状态分割为6个状态。各功率管导通区间如图3所示。
两种位置传感器安装方式在本质上是相同的,在电机旋转过程中,都将360°电角度分割为6种状态,其中60°安装方式可以认为是将120°安装时的一个霍尔元件反转180°安装,各元件换相时刻均相同。在换相控制中,将三个霍尔传感器的输出信号状态的组合作为状态控制变量,例如在图3所示的第一个运行区间内状态控制变量为H1 H2 H3(101)。在不同安装方式下各霍尔元件产生不一样的状态控制变量。在120°安装下,3个位置传感器信号组成的控制变量为001-110。60°安装状况下,将出现000和111的状态变量,而缺失中间的两个状态,因而他们的换相控制表是有区别的。通过观察霍尔传感器是否出现111和000的状态就可以判定霍尔传感器是哪种安装方式。
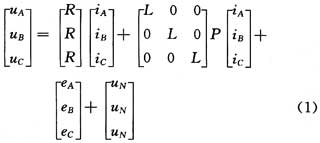
三相星形连接的无刷直流电机,其绕组等效模型如图1所示。做如下假设,无刷电机三相完全对称,磁路不饱和,不计磁滞和涡流损耗。三相绕组的电压平衡方程则如式(1)所示:
在无刷电机三相绕组均为开路的情况下,即iA=iB=iC=0,我们可以得到下面的结论。
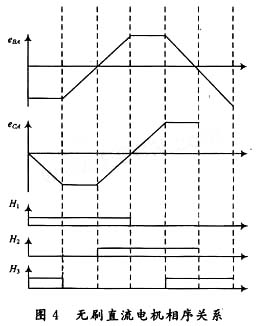
对于反电动势的相位关系,由图3中做进一步的推导,可以得出如图4所示的相位关系。依据这一相位图,可以清楚地分辨出各位置传感器与各相绕组间的相位关系,三相绕组间的电位关系也可以判定,根据图4同样可以测定三相绕组间的关系。
4 实验验证
使用一台无刷直流电机来验证前文提出的方法。实验电机型号为:57BL-3030H1-LS-B。额定转速为3 000 rpm,极对数为5,采用开关霍尔传感器作为位置传感器,位置传感器为120°安装方式。
在实验中,首先确定任一绕组作为A相参考绕组,转动电机,用示波器测量另外两相与A相间线电压的相位关系,得到的线电压波形如图5所示。对比图4,两个线电压波形的相位领先的则为uBA,据此可以快速确定B相和C相。
然后以铭uBA为参考相位,分别测量三个霍尔传感器与uBA的相位关系,其中一个波形如图6所示。对比图4,可以确定此位置传感器为A相绕组所对应,另两个位置传感器以同样的方法确定。
无刷直流电机|0">直流电机采用电子换向装置代替了传统直流电机的机械换向装置,又具有与直流电机类似的机械特性,其磁钢置于转子上,通过不断地变换定子绕组通电方式产生旋转磁场驱动转子转动。由于转子采用了永磁体结构,无刷直流电机具有体积小、重量轻、结构简单的特点。随着电力电子技术的发展,无刷直流电机的应用越来越广泛。快速有效地确定位置传感器和绕组间的相序关系是实现无刷直流电机调速功能的关键。
本文通过对三相无刷直流电机传感器位置、输出信号与绕组电动势间的关系进行分析,提出了一种测定其相序的有效方法。
2 无刷直流电机基本控制方法
无刷直流电机的转子磁钢呈瓦片形,磁极与定子绕组间气隙均匀,气隙磁场呈梯形分布。定子绕组感应电动势波形为梯形波。
无刷直流电机定子绕组通常采用三相星形接法,需要应用三相全桥控制电路,其驱动控制系统结构如图1所示。
功率管的换相信号需要从位置传感器的状态得出,换相时刻也就是霍尔传感器的信号状态改变的时刻。因此霍尔传感器和三相绕组对应关系的确定对于电机的正确运行非常重要。
3 相序测定的实用方法
3.1 位置传感器安装方式
位置传感器在无刷直流电机控制系统中起着非常重要的作用。它用于检测转子磁极的位置,为开关电路提供正确的换相信息。
无刷直流电机常用的位置传感器是霍尔传感器,霍尔元件数通常与绕组相数相等,转子磁钢作为霍尔元件的励磁磁场磁极。
为了产生正确的换向信号,霍尔传感器安装位置有一定要求,通常有120°安装和60°安装两种方式,如图2所示。
以位置传感器的信号状态区分,将无刷直流电机的运行状态分割为6个状态。各功率管导通区间如图3所示。
两种位置传感器安装方式在本质上是相同的,在电机旋转过程中,都将360°电角度分割为6种状态,其中60°安装方式可以认为是将120°安装时的一个霍尔元件反转180°安装,各元件换相时刻均相同。在换相控制中,将三个霍尔传感器的输出信号状态的组合作为状态控制变量,例如在图3所示的第一个运行区间内状态控制变量为H1 H2 H3(101)。在不同安装方式下各霍尔元件产生不一样的状态控制变量。在120°安装下,3个位置传感器信号组成的控制变量为001-110。60°安装状况下,将出现000和111的状态变量,而缺失中间的两个状态,因而他们的换相控制表是有区别的。通过观察霍尔传感器是否出现111和000的状态就可以判定霍尔传感器是哪种安装方式。
三相星形连接的无刷直流电机,其绕组等效模型如图1所示。做如下假设,无刷电机三相完全对称,磁路不饱和,不计磁滞和涡流损耗。三相绕组的电压平衡方程则如式(1)所示:
在无刷电机三相绕组均为开路的情况下,即iA=iB=iC=0,我们可以得到下面的结论。

对于反电动势的相位关系,由图3中做进一步的推导,可以得出如图4所示的相位关系。依据这一相位图,可以清楚地分辨出各位置传感器与各相绕组间的相位关系,三相绕组间的电位关系也可以判定,根据图4同样可以测定三相绕组间的关系。
4 实验验证
使用一台无刷直流电机来验证前文提出的方法。实验电机型号为:57BL-3030H1-LS-B。额定转速为3 000 rpm,极对数为5,采用开关霍尔传感器作为位置传感器,位置传感器为120°安装方式。
在实验中,首先确定任一绕组作为A相参考绕组,转动电机,用示波器测量另外两相与A相间线电压的相位关系,得到的线电压波形如图5所示。对比图4,两个线电压波形的相位领先的则为uBA,据此可以快速确定B相和C相。
然后以铭uBA为参考相位,分别测量三个霍尔传感器与uBA的相位关系,其中一个波形如图6所示。对比图4,可以确定此位置传感器为A相绕组所对应,另两个位置传感器以同样的方法确定。
- 基于单片机与TC787芯片的三相半控整流电路设计(11-25)
- 用于Quad-rotor飞行器的无刷直流电机驱动系统设计(06-09)
- 直流电机好不好,看看驱动电路设计就知道(01-27)
- 一种实用型直流电机控制电路的设计(04-08)
- 基于Motionchip的无刷直流电机伺服控制系统设计(01-04)
- 基于STM8的48V空调压缩机控制器设计(06-19)