用于Quad-rotor飞行器的无刷直流电机驱动系统设计
时间:06-09
来源:世界电子元器件
点击:
引言
Quad-rotor飞行器是固联的刚性十字交叉结构的小型无人飞行器,具有固定倾角,由四个独立电机驱动螺旋桨组成。它通过平衡四个螺旋桨产生的力来改变升力和飞行姿态,以实现稳定盘旋和精确飞行。
无刷直流电机是集交流电机和直流电机优点于一体的机电一体化产品,既具有交流电机结构简单、运行可靠等优点,又具备直流电机运行效率高、调速性能好等特点。而无位置传感器无刷直流电机还可以减少外部干扰对电机的影响。
本文选择ADuC7026作微处理器,无位置传感器无刷直流电机作为驱动电机,介绍了Quad-rotor飞行器驱动系统的整体设计。本文主要解决无位置传感器无刷直流电机的平稳快速起动以及电机转子位置信号的准确获取等问题。
无刷直流电机控制策略
电机起动方案
Quad-rotor飞行器需要螺旋桨高速旋转产生升力,只考虑转速精度即可,而不需考虑转矩精度,因此,起动只要求平稳快速。对于反电势过零检测法,反电势信号随电机转速增加而增加,在电机起动或低速运行时,反电势信号不够清晰,无法准确检测,因此电机起动必须采用其他方法。
无刷直流电动机从结构上讲,可以说是永磁式直流电动机,可以按他控式同步电动机方式起动。本文选择简单易行的三段式法外同步变频方式起动,包括转子预定位、加速起动和运行状态切换三个阶段。首先,要提供一个确定的功率开关电路导通状态,并持续一段时间,使定子绕组产生合成磁势吸引转子,使之转到一个确定的位置,这就完成了转子的预定位。然后,按照功率开关管的触发导通顺序,依次导通,并且逐渐提高开关管的导通频率,同时提高电机的端电压,使电机的转速逐渐提高,实现加速起动。最后,当电机转到一定速度,反电势信号足够清晰时,就可以切换到正常的三相六状态,即内同步状态运行。
反电势过零检测法原理
无位置传感器检测电机转子位置的方法主要有磁链计算法、反电势过零检测法、反电势三次谐波积分法、续流二极管导通检测方法、电感法以及状态观测器法等。反电势过零检测法是最常见最实用的方法。
两相导通三相六拍运行方式的无刷直流电机,在任一时刻,电机三相中都只有两相导通,每相的导通时间为120°。无刷直流电机的反电势波形严格反映了无刷直流电机转子磁极的位置,当无刷直流电机的某相绕组反电势过零时,转子直轴与该相绕组轴线恰好重合,因此只要检测到各相绕组反电势的过零点,就可以获知转子的若干个关键位置,再根据这些关键的转子位置信号做相应的处理后,控制无刷直流电动机换相,实现无刷直流电机连续运转 。
图1给出了反电势波形与逆变器功率管触发顺序逻辑关系。从反电势的波形可知,无刷直流电机的三相绕组在一个电角度内有六个过零点,也有六个换相点,而且每个过零点都超前下个换相点30°电角度,只要检测到六个过零点时刻,再延迟30°电角度即可得到相应的换相点时刻,据此可以确定电机转子的位置和下次换流的时间,从而实现电机的连续运转。
Quad-rotor飞行器是固联的刚性十字交叉结构的小型无人飞行器,具有固定倾角,由四个独立电机驱动螺旋桨组成。它通过平衡四个螺旋桨产生的力来改变升力和飞行姿态,以实现稳定盘旋和精确飞行。
无刷直流电机是集交流电机和直流电机优点于一体的机电一体化产品,既具有交流电机结构简单、运行可靠等优点,又具备直流电机运行效率高、调速性能好等特点。而无位置传感器无刷直流电机还可以减少外部干扰对电机的影响。
本文选择ADuC7026作微处理器,无位置传感器无刷直流电机作为驱动电机,介绍了Quad-rotor飞行器驱动系统的整体设计。本文主要解决无位置传感器无刷直流电机的平稳快速起动以及电机转子位置信号的准确获取等问题。
无刷直流电机控制策略
电机起动方案
Quad-rotor飞行器需要螺旋桨高速旋转产生升力,只考虑转速精度即可,而不需考虑转矩精度,因此,起动只要求平稳快速。对于反电势过零检测法,反电势信号随电机转速增加而增加,在电机起动或低速运行时,反电势信号不够清晰,无法准确检测,因此电机起动必须采用其他方法。
无刷直流电动机从结构上讲,可以说是永磁式直流电动机,可以按他控式同步电动机方式起动。本文选择简单易行的三段式法外同步变频方式起动,包括转子预定位、加速起动和运行状态切换三个阶段。首先,要提供一个确定的功率开关电路导通状态,并持续一段时间,使定子绕组产生合成磁势吸引转子,使之转到一个确定的位置,这就完成了转子的预定位。然后,按照功率开关管的触发导通顺序,依次导通,并且逐渐提高开关管的导通频率,同时提高电机的端电压,使电机的转速逐渐提高,实现加速起动。最后,当电机转到一定速度,反电势信号足够清晰时,就可以切换到正常的三相六状态,即内同步状态运行。
反电势过零检测法原理
无位置传感器检测电机转子位置的方法主要有磁链计算法、反电势过零检测法、反电势三次谐波积分法、续流二极管导通检测方法、电感法以及状态观测器法等。反电势过零检测法是最常见最实用的方法。
两相导通三相六拍运行方式的无刷直流电机,在任一时刻,电机三相中都只有两相导通,每相的导通时间为120°。无刷直流电机的反电势波形严格反映了无刷直流电机转子磁极的位置,当无刷直流电机的某相绕组反电势过零时,转子直轴与该相绕组轴线恰好重合,因此只要检测到各相绕组反电势的过零点,就可以获知转子的若干个关键位置,再根据这些关键的转子位置信号做相应的处理后,控制无刷直流电动机换相,实现无刷直流电机连续运转 。
图1给出了反电势波形与逆变器功率管触发顺序逻辑关系。从反电势的波形可知,无刷直流电机的三相绕组在一个电角度内有六个过零点,也有六个换相点,而且每个过零点都超前下个换相点30°电角度,只要检测到六个过零点时刻,再延迟30°电角度即可得到相应的换相点时刻,据此可以确定电机转子的位置和下次换流的时间,从而实现电机的连续运转。
|
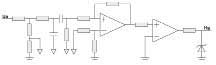
图1 反电势波形与逆变器功率管触发顺序逻辑关系 转子位置检测电路需准确检测到反电势信号的过零时刻,来保证无刷直流电机的正确换相。本文设计的转子位置检测电路如图2所示,主要包括分压网络、低通滤波器、隔直、差分和比较等环节。无刷直流电机三相绕组线圈的中性点无法直接获取,因此,要将端电压信号经电阻分压,得到虚拟中性点;无刷直流电机电子换相线路的控制换相信号经PWM高频载波得到,在端电压中必然存在一些高频干扰,因此,电阻分压后需经低通滤波环节滤除高频干扰信号;再用电容隔除直流信号,此时获得的信号包含一定的虚拟中性点电压,用一个差分环节消除虚拟中性点的影响,最后经比较环节后送入微处理器,微处理器根据此信号,可以获得反电势信号的过零点,从而控制电机换相。
|

- 基于STM8的48V空调压缩机控制器设计(06-19)
- 一种无刷直流电机电流采样及保护电路的设计(10-16)
- 基于Proteus和AVR单片机的无刷直流电机控制系统仿真(10-16)
- 无刷直流电机:如何通过 6 通道换向编码器实现最佳(04-13)
- 新型永磁同步电机控制芯片IRMCK203及其应用(01-16)
- AD698型LVDT信号调理电路的原理与应用(01-17)