用于Quad-rotor飞行器的无刷直流电机驱动系统设计
时间:06-09
来源:世界电子元器件
点击:
|
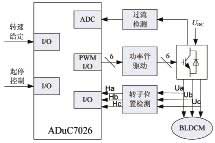
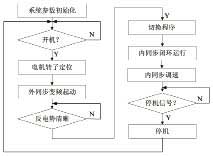
图3 驱动系统原理框图 软件设计 本文中,无刷直流电动机驱动系统的软件部分主要完成以下功能: (1)起动程序。由软件实现电机外同步变频加速起动,当电机达到一定转速时(反电势检测信号已清晰可靠),再由软件切换至内同步,即三相六状态运行。 (2)运行程序,包括转子位置获取电路,闭环调速程序。转子位置检测电路输入到微处理器,检测到的反电势过零点信号经ADuC7026处理后输出控制信号,控制功率开关电路通断。转子位置检测电路中的低通滤波环节会使反电势过零点信号发生相移,因此,要对反电势过零点信号进行相位检测并且根据转速给出相应的相位补偿,使电机运行可靠、高效。 部分程序流程图如图4所示。
|

- 基于STM8的48V空调压缩机控制器设计(06-19)
- 一种无刷直流电机电流采样及保护电路的设计(10-16)
- 基于Proteus和AVR单片机的无刷直流电机控制系统仿真(10-16)
- 无刷直流电机:如何通过 6 通道换向编码器实现最佳(04-13)
- 新型永磁同步电机控制芯片IRMCK203及其应用(01-16)
- AD698型LVDT信号调理电路的原理与应用(01-17)