实际工作时,在固定的Tc时间内对光电编码器的脉冲计数,在第一个光电编码器上升沿定时器开始定时,同时开始记录光电编码器和时钟脉冲数,定时器定时Tc时间到,对光电编码器的脉冲停止计数,而在下一个光电编码器的上升沿到来时刻,时钟脉冲才停止记录。采用M/T法既具有M法测速的高速优点,又具有T法测速的低速的优点,能够覆盖较广的转速范围,测量的精度也较高,在电机的控制中有着十分广泛的应用。
(二)使用增量式光电编码器来判别电机转速方向的原理
增量式光电编码器输出两路相位相差90o的脉冲信号A和B,当电机正转时,脉冲信号A的相位超前脉冲信号B的相位90o,此时逻辑电路处理后可形成高电平的方向信号Dir。当电机反转时,脉冲信号A的相位滞后脉冲信号B的相位90o,此时逻辑电路处理后的方向信号Dir为低电平。因此根据超前与滞后的关系可以确定电机的转向。其转速辩相的原理如图4所示
| 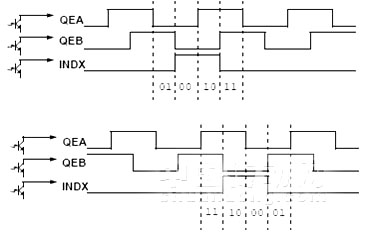
图4转向判别原理图
(三)、增量式光电编码器的反馈脉冲的四倍频原理
在使用增量式编码器时,通过计相位相差90o的两路正交脉冲信号A和B的上升沿与下降沿已达到将增量式编码器的反馈脉冲四倍频的目的。这样在不增加增量式光电编码器的线数的情况下,就可以获得更精度高的位置脉冲信息,以实现对电机位置的精确控制。其工作原理与脉冲的相位关系如图5所示
| 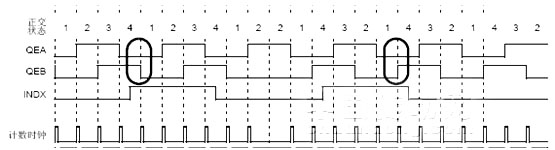 图5 脉冲四倍频相位关系图
结束语:
光电式编码器有着良好的抗干扰特性与应用的可靠性,在电机控制这种有着极高电磁感染的应用环境下有着广阔的应用前景。相信在不久的将来光电式编码器一定会在电机控制领域发挥更为重要的作用。而我们对于光电式编码器的研究也就显得格外的重要。
| |