光电编码器在电机控制中的应用
概述
电机的位置检测在电机控制中是十分重要的,特别是需要根据精确转子位置控制电机运动状态的应用场合,如位置伺服系统。电机控制系统中的位置检测通常有:微电机解算元件,光电元件,磁敏元件,电磁感应元件等。这些位置检测传感器|0">传感器或者与电机的非负载端同轴连接,或者直接安装在电机的特定的部位。其中光电元件的测量精度较高,能够准确的反应电机的转子的机械位置,从而间接的反映出与电机连接的机械负载的准确的机械位置,从而达到精确控制电机位置的目的。在本文中我将主要介绍高精度的光电编码器的内部结构、工作原理与位置检测的方法。
一、光电编码器的介绍:
光电编码器是通过读取光电编码盘上的图案或编码信息来表示与光电编码器相连的电机转子的位置信息的。根据光电编码器的工作原理可以将光电编码器分为绝对式光电编码器与增量式光电编码器,下面我就这两种光电编码器的结构与工作原理做介绍。
(一)、绝对式光电编码器
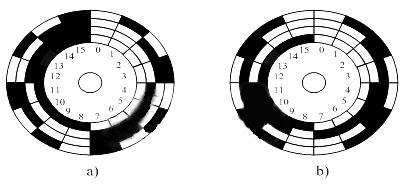
绝对式光电编码器如图所示,他是通过读取编码盘上的二进制的编码信息来表示绝对位置信息的。
编码盘是按照一定的编码形式制成的圆盘。图1是二进制的编码盘,图中空白部分是透光的,用"0"来表示;涂黑的部分是不透光的,用"1"来表示。通常将组成编码的圈称为码道,每个码道表示二进制数的一位,其中最外侧的是最低位,最里侧的是最高位。如果编码盘有4个码道,则由里向外的码道分别表示为二进制的23、22、21和20,4位二进制可形成16个二进制数,因此就将圆盘划分16个扇区,每个扇区对应一个4位二进制数,如0000、0001、…、1111。
|
图1 按照码盘上形成的码道配置相应的光电传感器,包括光源、透镜、码盘、光敏二极管和驱动电子线路。当码盘转到一定的角度时,扇区中透光的码道对应的光敏二极管导通,输出低电平"0",遮光的码道对应的光敏二极管不导通,输出高电平"1",这样形成与编码方式一致的高、低电平输出,从而获得扇区的位置脚。
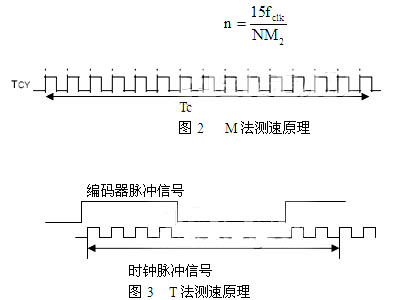
在实际的测量中,时间Tc内的脉冲个数不一定正好是整数,而且存在最大半个脉冲的误差。如果要求测量的误差小于规定的范围,比如说是小于百分之一,那么M1就应该大于50。在一定的转速下要增大检测脉冲数M1以减小误差,可以增大检测时间Tc单考虑到实际的应用检测时间很短,例如伺服系统中的测量速度用于反馈控制,一般应在0.01秒以下。由此可见,减小测量误差的方法是采用高线数的光电编码器。 |
- 增量光电编码器基本波形和电路(11-27)
- 安华高科技AEAT-84AD在阀门和机械手臂的应用(10-25)
- 新型永磁同步电机控制芯片IRMCK203及其应用(01-16)
- AD698型LVDT信号调理电路的原理与应用(01-17)
- 带全速USB接口的PICl8F4550应用设计(04-12)
- 毫欧姆电阻在汽车电子系统中的应用(05-11)