安华高科技AEAT-84AD在阀门和机械手臂的应用
现在的阀门大多为机电一体化设计,能通过电路系统对阀门进行自动化控制;电路系统实现对阀门开度的控制、反馈与调节,并做到精确无误定位,其重点在于阀门位置的精确反馈和执行机械设计的运行,这也是机电一体化综合设计中的难点。同样,在机械手臂应用中,比如在对底座、大臂、小臂或者多轴的系统控制中,需要实时检测它们的位置信息,并将其位置传送到控制中心进行处理;机械手臂的位置检测器,要求小尺寸,以便能更好的安装。
在阀门控制和机械手臂的控制中,在断电之后的上电,不需阀门和手臂的运动,就能检测到阀门和手臂的位置信息。做到这点则需要一套完整的绝对值编码器,同时在计量范围和精度方面更有优势。AVAGO多圈绝对值编码器AEAT-84AD系列,很适用于上述应用中,其优点在于尺寸小,无需电池保留位置信息,上电能立刻检测位置信息。
一, 安华高AEAT-84AD产品介绍
1, 多圈绝对值编码器

AEAT-84AD采用透射方式、检测多圈绝对值的光电编码器,其基本组成是光电发射管、光电检测以及6或者7个齿轮组成的模块。目前提供12位或者14位分辨精度;小尺寸的直径为55mm,高度为12.2mm;工作温度可在-40度到125度;旋转速度可达到12000/分钟;提供2×4的信号和电源连接。与ASAS-7000配合工作,可以通过高达30位的绝对值编码输出。
产品能很好的应用于半导体自动化,工业缝纫机,机器人,阀门控制等。
2, 功能框图

通过多路选择信号MTMUX[2:0],读出每个齿轮对应的三位信号数据MTDAT[2:0]。对于7个齿轮组的输出,则有7组三位数据可供读出,可以通过查找表的方式,或者简单计算的方法得到14位的格雷码输出。对应6个齿轮组的输出,转换的格雷码则为12位。
二, 阀门控制中的应用
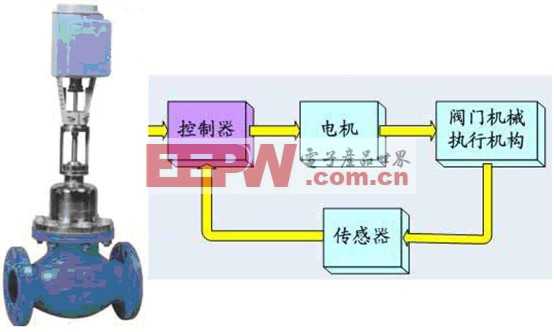
在机电一体化的阀门设计中,控制器根据要求或者上端输入的命令,控制电机执行阀门控制,并且通过绝对值编码器进行位置反馈给控制器,形成一个闭环的控制系统,能很好的实现阀门开度的控制、反馈与调节。该系统中,不需要电池或者存储部件保留阀门的位置信息,在系统加电后可直接获取阀门的开度信息,而不需要阀门执行机械的额外运动。
该多圈绝对值编码器模块,分辨率高,可靠性高,抗干扰能力强,而且电压范围也达5V。模块尺寸较小,安装方便快捷,为整个阀门的机械设计和电路设计提供简便,使智能电动阀门设计成为可能。
三, 机械手臂中的应用
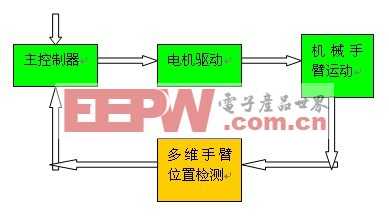
主控制器
电机驱动
机械手臂运动
多维手臂位置检测
一般来说,每一维的机械手臂位置信息的反馈,都需要一路编码器提供反馈。高精度机械手臂的应用中,比如半导体自动化的机械手臂,还可以考虑与ASAS-7000配合工作,最高可提供高达30位的多圈位置信息,为机械手臂的精确控制提供必要的反馈信息。对于AEAT-84AD,能检测出每分钟12000转的运动信息,反应非常灵敏;可以通过读取的位置信息,计算得到机械手臂的运动速度等参数。对于多维机械手臂的运动位置,在上电时可以由主控制器读取,这对于增量式的编码器有很大的优势。
对于机械手臂的设计,AEAT-84AD高精度,高灵敏度,小尺寸,模块化设计等优点,能更好的应用于其中。
在多圈光电绝对值编码器应用中,由于其位置信息不需要电池供电或其他的储存,在系统上电后便能方便的读取,这些优点是增量编码器所不能比拟的。其高精度,高灵敏度,快速反应,小尺寸,模块化设计等优点,能很好的应用在阀门控制、机械手臂、高精度位置控制部件中。
提示:该编码器的设计中,需要避免灰尘污染,尽量做到密闭。
有关此类产品的详细资料及技术支持信息,请联系安华高大中国区授权代理商世强电讯。
- 保护测试测量设备的隔离技巧(01-21)
- 光电编码器在电机控制中的应用(03-02)
- 增量光电编码器基本波形和电路(11-27)
- 12位串行A/D转换器MAX187的应用(10-06)
- AGC中频放大器设计(下)(10-07)
- 低功耗、3V工作电压、精度0.05% 的A/D变换器(10-09)