跨越鸿沟:同步世界中的异步信号
时间:08-21
来源:Mike Stein,Paradigm Works
点击:
它可以处理请求。这种握手方法要求请求电路延迟它的下一个请求,直到它检测到响应信号无效。可以用经验估算法判断这个协议的时序:信号跨越一个时钟域要花两个时钟周期的时间,信号在跨越多个时钟域前被电路寄存。全部的时间序列是:A 时钟域中最多五个周期加上 B 时钟域最多六个周期。全握手类型很强健,因为通过检测请求与响应信号,每个电路都清楚地知道对方的状态。这种方式的不足之处是完成所有交互的整个过程要花费很多时钟周期。
另一种类型是部分握手,它可以缩短这些事件的过程。使用部分握手信号时,通信双方的电路都不等对方的响应就中止各自的信号,并继续执行握手命令序列。部分握手类型比全握手类型在健壮性方面稍弱,因为握手信号并不指示各自电路的状态,每一电路都必须保存状态信息(在全握手信号里这个信息被送出去)。但是,由于无需等待其它电路的响应,完整的事件序列花费时间较少。
当使用部分握手信号方式时,响应的电路必须以正确的时序产生它的信号。如果响应电路要求先处理完一个请求,然后才能处理下一个请求,则响应信号的时序就很重要。电路用它的响应信号来指示它的处理任务何时完成。一种部分握手方法混合了电平与脉冲信号,而其它的方法则只使用脉冲信号。
在第一种部分握手方法中,电路 A 以有效电平声明其请求信号,电路 B 则以一个单时钟宽度脉冲作为响应。此时,电路 B 并不关心电路 A 何时中止它的请求信号。但为了使这种方法成立,电路 A 中止请求信号至少要有一个时钟周期长,否则,电路 B 就不能区别前一个请求和新的请求。在这种握手方式下,电路 B 为请求信号使用一个电平同步器,电路 A 为响应信号使用一个脉冲同步器。只有当电路 B 检测到请求信号时才发出响应脉冲。这种情况可以使电路 A 通过控制其请求信号的时序,控制同步器接收到的脉冲间隔(图 5)。同样可以用经验估算法确定时序,即信号跨越一个时钟域要花两个时钟周期并且在跨越时钟域前被电路寄存。
| 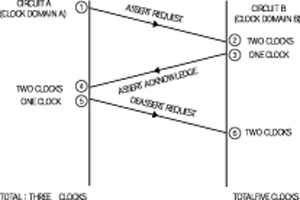
图5,在一种部分握手方法中,电路 A 发出它的请求信号,电路 B 则以一个单时钟宽度脉冲作为响应。 全部的序列为 A 时钟域最多三个周期加上 B 时钟域最多五个周期。这种部分握手方法比全握手方法在 A、B 两个时钟域分别少用了两个和一个时钟周期。如果采用第二种部分握手方法可以再减少一些时钟周期,此时电路 A 用一个单时钟宽度脉冲发出它的请求,而电路 B 也用一个单时钟宽度脉冲响应这个请求。这种情况下,两个电路都需要保存状态,以指示请求正待处理。
| 
图6,这种握手类型使用的是脉冲同步器,但如果其中一个电路时钟比另一个电路时钟快两倍,则可以用边沿检测同步器来代替。 这种握手类型使用的是脉冲同步器,但如果其中一个电路时钟比另一个电路时钟快两倍,则可以用边沿检测同步器来代替(图 6)。完整的时序是:A 时钟域最多两个周期加上 B 时钟域最多三个周期。所以这种部分握手技术与全握手方法相比,在 A 时钟域少用三个时钟周期,在 B 时钟域也少用三个时钟周期。同时,也比第一种部分握手方法分别在 A、B 时钟域快了一个和两个周期(表 2)。这些握手协议针对的都是跨越时钟域的单一信号。但当几组信号要跨越时钟域时,设计人员就需要使用更加复杂的信号传送方法。
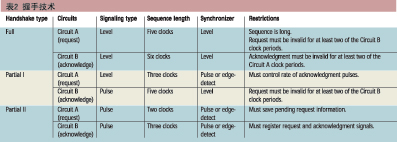 表 2 数据路径设计
在进行信号同步时有一个重要的规则,那就是不应当在设计中的多个地方对同一信号进行同步,即单个信号扇出至多个同步器。因为同步要花一到两个时钟周期,设计者不能确切地预测到每个信号何时跨越一个时钟域。此外,在新时钟域中一组经同步后的信号其时序是不定的,因为同步延迟可以是一到两个时钟周期,这与输入信号到达同步器的时间有关。这种情况会在各个同步信号间形成一种"竞争状况"。这种竞争状况在需要跨越时钟域传输的多组信号间也会发生,例如数据总线、地址总线和控制总线等。因此,不能对组中的每个信号单独使用同步器,也不能对数据或地址总线的每一位单独使用同步器,因为在新的时钟域中,要求每个信号同时有效。
一种解决总线同步问题的方法是使用一个保持寄存器和握手信号。这种电路包括一个保持信号总线的寄存器,以及一个握手机制(图 7)。握手信号指示新时钟域的电路何时可以对总线采样,以及源电路何时可以更换当前寄存器中保存的内容。
| 
图7 | | | |