基于DSP的无刷直流电机伺服系统设计
时间:03-14
来源:电子设计工程
点击:
2.2 速度环控制
速度环是位置环的重要内环路,速度闭环可改善控制对象的线性度,提高速度控制精度,改善电网电压等对电机转速的影响,提高抗干扰能力,改善系统性能。
转子旋转一周的时间内,霍尔传感器输出3路180°的交叠信号,电动机每转动60°就有一次换相,只要检测两次换相的时间间隔就能计算出电机的速度。
2.3 位置环控制
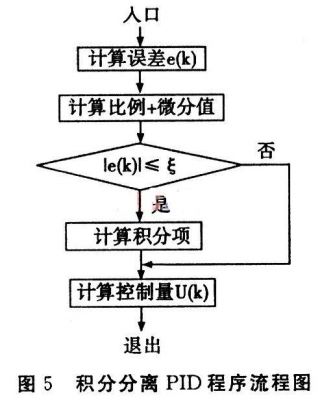
位置环是通过安装在电机转轴上的电位器实现闭环的控制环路,位置环路的控制对象是电流环和传动机构。由电位器测得的电压信号经过信号解调和AD转换得到位置反馈信号。由于位置环具有很大的不确定性,加之被控对象的非线性以及系统参数的时变性等,为了减小电机在运行过程中积分校正对系统动态性能的影响,本系统对位置环采用积分分离的PID算法。如图4所示,积分分离法是在误差量较大时,不进行积分,直至误差达到一定值之后,才在控制量的计算中加入积分累积。算法为:

3 系统软件实现
伺服控制系统的软件采用模块化设计,使软件组织灵活有序,便于调整、修改和移植。DSP程序主要由主程序,信号采集与输出程序,PID算法程序,串口通信程序,滤波程序等组成。主程序首先是DSP的初始化,包括设置系统时钟、定时器、系统状态寄存器、设置IO端口。然后初始化中断设置,确定系统所需要用到的中断类别及中断子程序,再设置事件管理器,产生PWM波。图5为积分分离的PID程序流程图,用积分分离的改进算法效果较好,程序简单。
4 结束语
本文设计了一种基于TMS320F2812DSP的无刷直流电机伺服控制系统,采用积分分离的PID控制算法,根据偏差,对不同情况进行不同的PID控制,并对系统的硬件设计以及控制算法进行了研究。试验结果表明,系统响应快,性能稳定,能较好的满足伺服系统的控制性能要求。
发布者:小宇
- 在采用FPGA设计DSP系统中仿真的重要性 (06-21)
- 基于 DSP Builder的FIR滤波器的设计与实现(06-21)
- 达芬奇数字媒体片上系统的架构和Linux启动过程(06-02)
- FPGA的DSP性能揭秘(06-16)
- 用CPLD实现DSP与PLX9054之间的连接(07-23)
- DSP+FPGA结构在雷达模拟系统中的应用(01-02)