基于DSP的无刷直流电机伺服系统设计
O 引言
无刷直流电机(简称BLDCM)是一种用电子换向器取代机械电刷和机械换向器的新型直流电动机,具有结构简单,调速性好,效率高等优点,目前已经得到广泛应用。TMS320F2812数字信号处理器是TI公司最新推出的32位定点DSP控制器,器件上集成了多种先进的外设,具有灵活可靠的控制和通信模块,完全可以实现电机系统的控制和通信功能,为电机伺服系统的实现提供了良好的平台。本文设计了以高性能TMS-320F2812DSP芯片为核心的无刷直流电机伺服控制系统。
1 伺服控制系统硬件构成及其工作原理
系统硬件框图如图1所示。
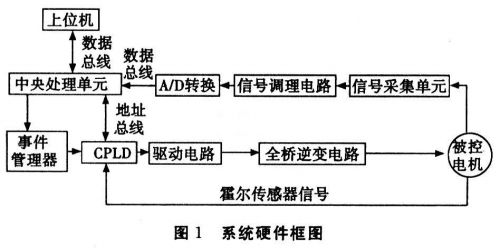
1.1 控制电路
控制电路是以F2812为核心,另外还包括位置编码、数据采集、数据通信等功能模块和部分外围电路及数据接口,其主要功能是实现对被控对象位置信息的采集和处理,速度反馈信息的接收和处理,位置、速度的闭环控制。F2812片内具有12位的AD转换器,但为提高伺服系统运动的精度,在DSP外围扩展了两片6路16位的AD转换芯片,用来采集反馈信号以及输入的运动指令信号。
系统设计同时采用DSP和CPLD以提高电路的可行性。DSP所起到的作用主要是根据反馈的位置,速度信号,结合电机的运动方向和运动速度,利用F2812片上的电机控制专用外设EVA,通过数字I/O口输出1路与电机运动相对应的PWM波。CPLD根据输入的PWM信号,控制信号和数字信号组成的换相时序信息输出对应大小和对应时序的相电压,从而驱动电机做相应的运动。
1.2 信号采集以及调理电路
该电路对各种传感器信号及电流电压信号进行采集并处理。包括采样的电流电压反馈信号,给定的控制信号等模拟量信号,以及霍尔传感器的输出等开关量信号,经调理电路处理后,使其幅值及电平可以满足DSP控制器的要求。
本系统使用AD7656对采集来的模拟信号进行模数转换。F2812的GPIOA0口与74ACl6373的使能端相连,用于使能锁存器,GPIOAl与CONVSTX相连,用来启动6路A/D的同时转换。GPIOA2连接BUSY信号,AD7656转换结束后,BUSY信号变低,DSP以查询方式接收AD数据。74ACl6373用于锁存AD转换后的16位数据,74LSl38用于将DSP地址线译码与AD7656的片选信号相连。
1.3 驱动电路
电机的驱动电路由驱动芯片IR2130和三相全逆变电路构成。功率驱动电路采用+15 V供电,驱动芯片IR2130内置了2.5 μs的死区时间,防止统一桥臂的上下两个MOSFET同时导通。当系统出现欠压,过流时,IR2130启动内置的保护电路锁住后面的PWM输出,保护系统电路。IR2-130的输入信号是由CPLD解算而得的6路PWM波,经过光耦隔离后送入IR2130,输出信号送MOSFET驱动无刷直流电机。在三相逆变电路中,六个功率器件起绕组开关作用,采用两两通电,三相六状态方式,每一个瞬间有两个功率管导通,每隔1/6周期(60°电角度)换相一次,每次换相一个功率管,每个功率管一次导通120°电角度。
2 伺服系统的控制策略
本系统是通过电流、速度、位置三闭环结构实现系统控制的,其中电流环和速度环是内环,位置环是外环。

图2是无刷直流电机控制系统框图,在系统中设置了速度PI调节器和电流PI调节器,分别调节电机的转速和电流,两者之间是串级连接。给定的位置信号U与反馈的位置信号position经过位置PID调节后得到速度的参考值SDref。根据两次捕获的时间可以计算出电机运行的速度speed,此速度作为速度参考值的反馈量,经过速度PI调节后可以得到参考电流Iref,通过电流检测电路可以得到电流的反馈量I,再经过电流PI调节,最后得到的调节量用来控制PWM的占空比,即把速度调节器的输出当做电流调节器的输入,再以电流调节器的输出去控制PWM装置。
2.1 电流环控制
电流环是通过电流反馈控制使电机电枢电流线性受控,可达到电机输出力矩的线性控制,并使其动态范围响应快,安全性提高。
在实际应用中,为加快系统响应速度,减轻DSP负担,采用模拟实现方法。将电阻串联在电枢回路上,同时起到一个功率变换电路的过电流保护作用。通过电流反馈控制使电机电枢电流线性受控,可达到电机输出力矩的线性控制,并使其动态范围响应快,安全性提高。
电流环设计中,电流调节器选用PI调节器;限幅器可以和电流调节器做在一起,限幅值由PWM功放输入范围确定;PWM功放选用专用集成电路;滤波保护网络采用LC网络提高EMC水平,二极管网络保护PWM功放选;电流调节器选用PI调节器;采样电阻选用O.1Ω,如果所选PWM功放具有电流测量端子,也可以直接读出电机电流值。

图3为电流环控制框图,R-电机电枢电阻,Tm-电机时常数。Ks-功率放大器电压放大系数。电流环设计的参数:PI调节器,一阶无静差;输出最大电流≥0.63 A,反馈系数为15.873;带宽≥30 Hz;τi选为电机等效时常数。
- 在采用FPGA设计DSP系统中仿真的重要性 (06-21)
- 基于 DSP Builder的FIR滤波器的设计与实现(06-21)
- 达芬奇数字媒体片上系统的架构和Linux启动过程(06-02)
- FPGA的DSP性能揭秘(06-16)
- 用CPLD实现DSP与PLX9054之间的连接(07-23)
- DSP+FPGA结构在雷达模拟系统中的应用(01-02)