基于DSP的光学探测陀螺稳定系统的设计
时间:01-04
来源:作者:仇海涛 韩永根 杨涛
点击:
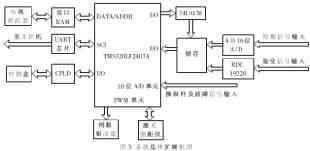
陀螺选用俄罗斯Fizoptika公司的光纤陀螺VG941-3AM,用于测量负载框架相对于惯性空间的角速率,输出模拟电压信号(0~3V),陀螺信号通过信号处理电路转成与A/D 芯片匹配的输入电平。本系统选用2 片ADI公司的16位A/D芯片ADS7805U,可同时采样,转换时间为4μs,满足系统要求。A/D转换后的16位信号送到两片锁存器(SN74HC574)中,由DSP控制74LS138选通锁存来读取陀螺信号。
3.2 直流力矩电机伺服驱动接口
电机功放电路选用IR公司的电机驱动芯片IR2104。IR2104是一种高电压、高速度的功率MOSFET和IGBT驱动器,工作电压10~20V。系统使用两片IR2104控制四片N沟道的IGBT(IRF540N)组成一个全桥驱动电路控制一台直流力矩电机。IR2104通过HO输出分别控制全桥驱动电路的上半桥Q1、Q3的导通与关断,而IR2104的LO输出分别控制全桥驱动电路的下半桥Q2、Q4的导通与关断,从而达到控制电机转速与正反转的目的。电机驱动接口如图4所示(仅画出一路)。
3.3 旋转变压器信号接口
在本系统中,选用DDC公司的专用RDC模块19220,接收来自旋变粗、精通道的激磁信号,其中精通道的bit4-bit11转换后直接送到低位锁存中,bit1-bit3送到中位锁存的低三位,精通道的bit1-bit5再和粗通道在MD27C256中精粗精组合后送到中、高位锁存,形成旋变的18位数据,分辨率为4.94″。单路旋变接口实现如图5所示。
软件设计包括初始化、自检、控制算法、故障处理、以及各功能模块的编写,考虑到稳定模块的实时性比较高,整个系统程序采用汇编语言设计编写,伺服采样周期为1ms。
系统控制命令既可以由控制盒发出,也可以由上位机发出。上位机还可以设定如测漂参数、位置指令参数等以完成各种系统监测所需的参数设置,同时上位机还接收、显示存储来自平台的包括陀螺、旋变、电机等各种实时信息,用于数据处理和分析判断。软件采用模块化设计,方便软件的调试,可扩展性、可移植性强。系统软件框图如图6所示。

(1) 旋变锁定
系统根据旋变信息对平台施矩,将其控制到旋变的电零位,旋变锁定状态持续5秒钟后结束并自动转入陀螺稳定状态。
(2) 稳定测漂
操作员键入采样周期和采样时间后,系统进入稳定测漂状态,测漂完成后自动补偿陀螺漂移。
(3) 位置指令
系统接收到目标的纬度、经度、高度三个参数,然后从载体系统中读入自身的横滚角、俯仰角、方位角三个参数,根据这六个参数计算得出自身所要转动的俯仰、方位角度,然后控制平台电机转动到相应位置。
(4) 目标搜索
此时由操纵杆控制俯仰、方位两个电机的运动,DSP接收到目标搜索的指令码后,分别取出地面控制台给出的俯仰、方位两个电机的速度值,然后按照操纵杆给出的俯仰、方位两个电机的速度值控制平台转动,进行目标搜索。
(5) 光电跟踪
系统接收到光电跟踪的指令码,选择相应的跟踪方式,然后根据电视跟踪器传来的俯仰、方位的脱靶量控制两个电机平台运动,跟踪目标点。
5 系统实验及结论
5.1静态稳定精度检测
开机使平台进入稳定状态,分别给方位、俯仰轴添加负载。3 000gcm扰动力矩下,系统旋变角度输出如图7所示(在60秒时刻施加干扰力矩),满足设计要求。
5.2 动态稳定精度检测
开机使平台进入稳定状态,在俯仰稳定框安装双面反射镜,调整好双面反射镜、平行光管和光电观测仪,使方位稳定轴进入稳定功能状态,使方位摇摆轴按照正弦波作摇摆运动,观察光电观测仪的读数,如果小于要求值,即满足要求。实测稳定台方位轴摇摆幅度为0.2′,俯仰轴摇摆幅度为0.3′,远小于设计指标,满足技术指标要求。
本文详细论述了瞄准线稳定高精度系统及其软硬件设计。系统采用经典的位置速率双环控制结构,选用DSP 作为数字控制系统的核心,组成高精度瞄准线稳定系统。对各项动、静态性能指标进行了测试, 达到了预期设计指标。
参考文献
[1] 王连明. 机载光电平台的稳定与跟踪伺服控制技术研究[D]. 长春:中国科学院长春光学精密机械与物理研究所,2002:45-46.
[2]JAMES D, STEPHEN S A, JIM S, et al. High performance gimbal control for self2 protection systems[C].Proceedings of SPIE. 1998,3365:77-86.
[3] 杨海峰,李奇,姬伟. 高精度伺服稳定跟踪平台数字控制器研制[J].东南大学学报(自然科学版)增刊,2004,34:96-100.
- 在采用FPGA设计DSP系统中仿真的重要性 (06-21)
- 基于 DSP Builder的FIR滤波器的设计与实现(06-21)
- 达芬奇数字媒体片上系统的架构和Linux启动过程(06-02)
- FPGA的DSP性能揭秘(06-16)
- 用CPLD实现DSP与PLX9054之间的连接(07-23)
- DSP+FPGA结构在雷达模拟系统中的应用(01-02)