机器人示教盒系统的设计
1 引言
机器人技术是综合了计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多学科而形成的高新技术,是当代研究十分活跃,应用日益广泛的领域。机器人应用情况,是一个国家工业自动化水平的重要标志。美国机器人学会定义机器人为:一个可再编程,多功能的机械手,他通过各种可改变程序的运动来完成不同的工作任务。为推动我校机器人教学,特进行教学机器人的研制。大多数传统机器人一般采用如下的三种方式编程:(1)示教盒直接示教编程。(2)间接示教编程(即牵引示教编程)。(3)离线编程。我们所研制的教学机器人采用示教盒编程,具有5自由度。为提高机器人的运动和定位精度,采用了小步距角的步进电机并辅以高精度的传动机构。
2.机器人控制系统体系结构
控制系统是机器人的重要组成部分,它是一种典型的多轴实时运动控制系统,其作用是支配执行机构按所需的顺序,沿规定的位置或轨迹运动。该控制系统的硬件包括主机,运动控制卡,驱动器,运动电机,示教盒等。其结构如图1所示。
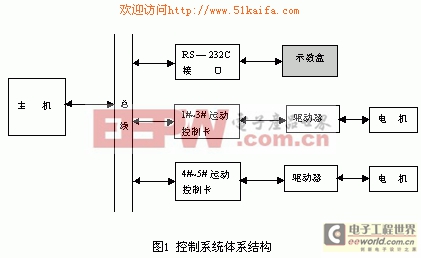
主机采用Pentinum III的PC机,运动控制卡采用北京东方嘉志6020系列的步进电机控制卡,一块控制卡可控制3个步进电机,研制的机器人为5自由度,需5个步进电机,因此采用两块控制卡。控制卡向驱动器输出电机驱动信号,报警等控制信号,驱动器的作用是将控制信号放大,以驱动步进电机运动。
所研制的示教盒是机器人和操作者人机交互的工具,类似于PC机的键盘并具有一定的显示功能。由盒体、键盘、显示屏、控制电路等组成。示教盒面板上有32个键:数字键和功能键。按键采用轻巧超薄的薄膜开关,操纵者通过键盘输入任何信息。如:功能选取、坐标切换、各种运动指令等。显示屏采用一个“米”字管和6 个数码管,用以显示各种提示信息,坐标位置信息,状态信息。示教盒与主机间采用RS—232C标准串口进行通讯。
3.示教盒的硬件设计
示教盒的硬件结构实质上是以8031芯片为核心的单片机系统,其结构如图2所示。
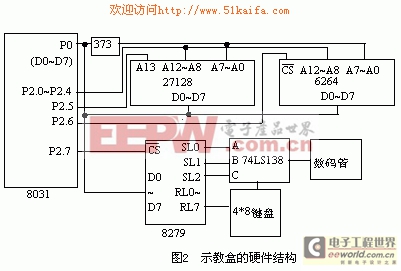
电路是以8031为核心,程序存放在只读程序存储器27128中,地址范围:0000H~3FFFH,数据存放在数据存储器6264中,地址范围是:4000H~5FFFH, 8279芯片的口地址为:8000H,8001H,由它完成命令输入与显示,显示稳定,程序简单,不会出现误动作,接6个数码管和1个米字管,采用米字管显示X、Y、Z,W等数码管不能显示的字符。
4.示教盒的软件设计
4.1 软件模块结构图
示教盒的软件总体框架如图3所示。

开机后,进行8279芯片、串行通讯的初始化,初始化成功后显示Whman_1提示信息,随后可进行三种模式的选取:示教模式、工作模式、再现模式。在示教模式下主要完成对机器人的示教操作。可在关节坐标系和直角坐标系下示教,并可随时进行两种坐标空间的切换,示教模块的输出为规定机器人再现运动方式的指令文件和记录示教点位置信息的位置文件;再现模式主要完成机器人的再现操作;进入工作模式后选择任务号,机器人毋须人工干预自动工作。
4.2显示部分的软件设计
显示部分的软件分为两类:一般显示和坐标连续显示。
4.2.1一般显示
操作者在通过示教盒操作机器人时,示教盒的显示区应显示相应的提示信息,供操作者参考。在该类显示子程序设计中,先将显示指针指向显示缓冲区的首址,要显示字符的个数,地址信息分别送给寄存器(如R1,R2),每显示一个字符后,显示计数器减一,显示地址加一,然后送下一个数码。
4.2.2坐标连续显示
进行示教时,当按下某一坐标键后(不释放),机器人末端执行器连续运动,到所需的位置后,再释放该键,机器人停止运动。在这整个过程中数码管需不断更新显示相应坐标的位置数据。在这类显示子程序中,设定最多能显示5位位置数据,用20h, 21h, 22h, 23h, 24h 分别存放个位,十位,百位,千位,万位显示指针所指向的显示缓冲区的地址,显示缓冲区存放的是0~9的显示码。8279芯片设置为FIFO/传感器RAM 工作方式。
4.3 键盘部分的软件设计
采用Intel 8279通用可编程的键盘显示器接口芯片,由8279控制的键盘输入部分最多为64个触点的键盘,本系统采用32个触点的键盘。先对8279进行初始化:设置8279的工作方式,数码管显示采用左端输入、双键互锁,编码扫描方式;设置分频数使内部工作频率为100khz;清除8279中FIFO RAM和显示RAM中的数据。读键盘程序中包括读出8279中的状态字,判断是否有键按下,如有,则读出键值,按键值进行散转程序。
4.4 通讯软件的设计
4.4.1 通讯协议的制定:
为确保通讯成功,通讯双方必须在软件上有一系列的约定,通常称为软件“协议”。在该系统中采用的协议如下:
(1)开始通讯时,示教盒发送一个呼叫信号“06H”,询问主控机是否可以接收数据;
(2)主控机接收到呼叫信号后,若同意接收数据则发回“00H”作应答,否则发“15H”表示暂不能接收数据;
(3)示教盒只有收到应答信号“00H”后,才可把数据发送给主控机,否则继续向主控机呼叫,直到对方同意接收。
(4)主控机根据接收到的“校验和”判断已接收到的数据是否正确。若接收正确,向示教盒回发“0FH”信号,否则回发“F0H”。
(5)示教盒只有接到信号“0FH”才算完成发送任务,否则继续呼叫,重发数据。
其发送数据格式为:
- 基于DSP的机器人视觉伺服系统研究(04-17)
- 基于DSP的自动避障小车(04-05)
- 基于DSP的双足机器人运动控制系统设计(06-21)
- 用于日本震后救援的机器人技术(03-03)
- 基于TMS32OLF2407A的教育机器人硬件系统设计 (08-21)
- 基于DSP的覆冰机器人控制系统设计(02-13)