用于日本震后救援的机器人技术
日本大地震造成众多房屋倒塌和人员伤亡,核泄漏更使救援工作更加艰巨。日本作为机器人技术最先进、应用最广的国家,将使用机器人参与此次地震搜救工作。
因为搜救机器人能够到达人无法进入的区域,比如废墟中、核污染区。据国外媒体报道,目前至少已经确认有两支救援队将使用机器人来配合工作。其中一个机器人就是蛇形机器人,长26英尺(约8米),带内窥镜摄像机,能深入废墟内部,探测是否有伤员存在。另一个机器人是Quince,该机器人有四个轮子,一个长长的手臂,并装有摄像头。操控人员可以根据摄像头看到的环境操纵机器人,让机器人打开门锁,运送水和食物等。机器人还装有红外传感器和二氧化碳传感器,通过探测人的体温和呼出的二氧化碳来发现被困人员,还能绘制所在环境的三维地图。
震后救援困难?机器人队员显身手
蛇形机器人
日本的机器人专家计划使用KOHGA3地面机器人在日本本州岛东北部八户地区的一座坍塌的大楼里进行侦测。(下图中所示是正在测试中的机器人)。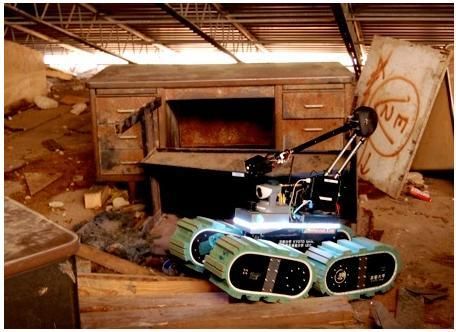
之前的两支救援队正在整装待发,准备部署地面机器人和蛇形机器人。一支救援队位于东京,另一救援队位于仙台,并且他们准备在必要时到达日本任何地区参与搜救。
现在,我们了解到,另外两支救援队也准备使用机器人。一队由千叶理工学院的Eiji Koyanagi教授率领,他们是应位于东京东部仙台地区鹿岛的一家公司的请求,使用机器人检测水下基础设施(机器人专家不允许透露这家公司的名称以及基础设施的性质)。Koyanagi教授到达现场,评估可以使用哪种机器人。
另一队由京都大学的Fumitoshi Matsuno教授率领,Fumitoshi Matsuno教授现任国际救援体系学会副会长,这支队伍将抵达青森地区的八户,帮助检测一座天花板坍塌的大楼。他们将与来自八户理工学院的同行合作,派出名叫KOHGA3的地面救援机器人。
机器人在鹿岛和八户的工作都不涉及幸存者搜救。他们担负的使命是复原,目标是确定损失情况,在修复和重建方面做出下一步规划。
事实上,从现在起,复原应该成为大多数机器人的工作重点,而不是搜救工作。但是,日本的这两支队伍仍做好准备在紧急情况发生时利用机器人帮助有需要的灾民。
据日本东北大学教授兼国际救援体系学会会长Satoshi Tadokoro所述,他已经与仙台和神户的消防厅、贸易产业部东北分部及多家企业取得联系,表明他的救援队里的机器人可以完成任何类型的使命。他表示, 机器人特别适合仓库和工厂救援。他说:"我的机器可以检测受损的工厂,特别是危险区域,比如化工厂。"
救援机器人队伍中有许 多日本著名专家,如Tadokoro、Koyanagi、Matsuno和来自长冈理工大学的同事Tetsuya Kimura,以及来自新鸿理工学院的Katsuji Ohgane。在地震发生时,他们实际上正在美国,正在灾难城市进行机器人试验,参加美国德州农工大学由机器人辅助搜救中心(CRASAR)组织的一次行 业研讨会,研讨会的主办者为Robin Murphy教授,也是救援机器人领域的一名权威人士。这些研究人员还是IEEE机器人和自动化协会会员。
在得知地震消息后,他们立即飞回日本。Tadokoro教授离开成田机场后,驱车赶往他位于仙台的家乡,随车带着大量的工具--一个象坦克一样名叫Quince的地面救援机器人,和活动内窥镜照像机、还有一个遥控的蛇形机器人。
Quince(如下图所示)的研发作为日本新能源和工业技术开发机构(NEDO)项目的一部分,是在国际救援体系学会的支持下,由Tadokoro教授和Koyanagi教授领导的多名科研人员共同取得的研究成果。

活动内窥镜照像机是日本多种机器人之一,一直在实际灾难中应用。下面的照片是2008年美国佛罗里达州杰克逊维尔市Berkman Plaza 2车库倒塌时这款机器人的实际工作场景。
在驱车赶往仙台,经过海岸边的公路时,Tadokoro教授看到倒塌的建筑物并不多,这个地区的主要破坏是由海啸引起的。也就是说,这里可能并不需要他的机器人,因为机器人最适合的是检测破碎受损的结构。
但Tadokoro教授和他的同事们没有时间休息。复原工作刚刚开始,可能还会有更多的余震,加上核危机的威胁,这些机器人专家和机器人都处在随时待命的状态。
更多KOHGA3照片:


本文中照片由京都大学、东北大学和国际救援体系学会提供
机器人 相关文章:
- 基于DSP的机器人视觉伺服系统研究(04-17)
- 基于DSP的自动避障小车(04-05)
- 基于DSP的双足机器人运动控制系统设计(06-21)
- 基于TMS32OLF2407A的教育机器人硬件系统设计 (08-21)
- 基于DSP的覆冰机器人控制系统设计(02-13)
- 基于DSP和FPGA的机器人声控系统设计(02-26)