以ARM和DSP嵌入式系统为核心的实时仿真平台的开发
切断主电路,封锁输入输出,再关闭系统,并发出警报;如果一切正常且主控指令位指示“打开”,则读取此子系统的给定信号(由通信中断服务程序从FIFO中读出并存入相应地址的存储器中),即转速和转矩仿真结果数据的接收,再调用捕获子程序从相应接口输入实际转速和转矩的反馈值。给定值和反馈值准备完毕,系统才开始使用某种控制算法对给定数据和反馈数据进行处理。
完成了一个电机闭环恒转速控制算法后,产生相应的PWM信号输出给电机功率驱动电路,再由驱动电路控制电机跟随仿真给定转速和转矩信号,完成对推动系统转速和转矩的物理模拟。这里使用的控制算法可以是交流电机控制的各种算法,有要求较低的恒压频比、恒电动势频比算法,也有要求高的矢量控制算法和直接转矩控制算法。完成此步控制算法输出PWM信号后,再返回到开头处。如此循环,直到出现不正常或ARM主控程序结束该任务进程。该部分程序的主要结构如图6所示。
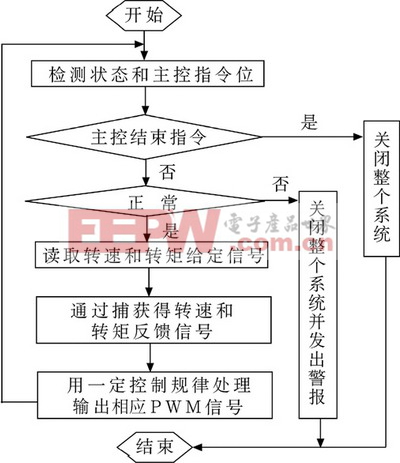
图6 C2000DSP部分的软件组织结构
芯片间的通信控制
该系统由3大部分构成,各部分之间的通信关系如图1所示。ARM与C5000DSP之间相互通信,C5000DSP与C2000DSP之间相互通信,ARM与C2000DSP之间也相互通信。其中,前两者是通过中断方式来完成的,而后者是通过直接传送的方式完成的。
ARM与C5000DSP之间通过ARM向C5000发出中断信号,告知C5000要准备接收数据。然后ARM将数据放到两方共享的API中。DSP接收到中断信号后,开始中断服务程序,从API的相应位置取出数据,之后向ARM发出回复信号,以表示数
据被取走,而后继续准备开始接收新的数据。ARM接收到来自C5000的回复信号,开始发送新的数据。如此反复,直到传递完所有数据。反过来,由C5000DSP向ARM发送数据,其过程与上面相同,只是收发方互换位置。
C5000DSP与C2000DSP之间的通信是单向的,即C5000只进行发送而C2000只进行接收。它们之间是通过FIFO进行缓冲的。C5000首先将仿真运算的转速和转矩数据通过总线放入接在其IO空间的FIFO中,再向C2000发送中断请求。C2000收到后,响应中断,进行中断服务,从FIFO的相应位置取出数据并存入特定地址的存储器中,再回复C5000告知数据已经被取出。如此周而复始,不断进行数据的收发。
ARM与C2000DSP之间的通信主要是ARM主控打开或关闭C2000系统,采用单向直接传送方式。它们之间通过各自的一个GPIO(通用IO口)相连,ARM发送,C2000接收。ARM要打开C2000系统时,只需向其对应的GPIO写1,而ARM要关闭C2000系统时,只需向其对应的GPIO写0。在C2000部分,在主体循环程序中每次查询C2000的对应GPIO口,读为1则表示继续其进程,而读为0则表示关断其进程。
ARM+DSP嵌入式仿真平台与以工控机为核心的仿真平台的比较
以ARM+DSP为核心的嵌入式仿真平台系统与以工控机为核心的仿真平台系统相比在仿真的实时性和精确度方面具有很多优势。
(1)使用专用的DSP完成运算,相比通用PC处理器80×86的精确度更高。
(2)ARM和DSP分工明确,各司其职,比单一的PC处理器完成仿真任务要快很多。SMSC2000在进行主机仿真时,由于处理器、操作系统和VB开发工具的限制,每求解一次数学模型需要的时间在ms级,其采样周期也在ms级以上;而以ARM+DSP为核心的嵌入式仿真平台系统,由于采用功能强大的双核构架,每求解一次数学模型需要的时间在μs级,采样周期也相应减小很多,即仿真的步长更小,大幅度提高了仿真的精确度。
(3)软件系统是在裸机的基础上建立的,实时性完全由开发人员决定,不受非实时操作系统限制。
结束语
针对船舶推进系统研制的新颖ARM+DSP嵌入式仿真平台扬长了ARM与DSP两种嵌入式处理器的特点,集丰富的控制接口和高速运算处理能力于一体。该仿真平台系统结构清晰,各部分专用功能强大,任务分配明确,相互之间都有通信交互。该系统存储器容量大,各器件速度快,集成度高。软件编程从系统和应用的角度出发,密切结合实际情况,软件结构适合嵌入式系统运行。系统的软硬件都有较大扩展空间。用该仿真平台代替传统的基于工控计算机的仿真模式真正达到了实时要求,其运行的数学模型更精确,控制物理设备的能力更强。
该仿真平台同样可用于船舶电站、船舶辅机、机舱报警等系统的仿真,并通过CAN总线与主控站联络。它不光强化了单一工作站的功能,而且使整个DCS网络演化为FCS网络,大大提高了系统的实时性。
仿真 平台 开发 实时 核心 DSP 嵌入式 系统 ARM 相关文章:
- 在采用FPGA设计DSP系统中仿真的重要性 (06-21)
- 数字频率合成器的FPGA实现(08-07)
- 基于DSP的导弹仿真器嵌入式组件设计(04-30)
- 如何将DSP和MCU两者完美结合(08-10)
- 高性能仿真器与开发包加速普及DSP应用开发(11-22)
- 基于DSP内嵌PCI总线的卫星信号仿真器设计(04-17)