以ARM和DSP嵌入式系统为核心的实时仿真平台的开发
大。在ARM和C5000DSP(即TMS320VC5470)部分有8MB的外部FLASH;在C2000DSP(TMS320LF2407)部分有32KW的在片FLASH,而且还可以进行外扩。这样,该系统就可以固化大量的程序代码,适合开发大型的程序。
(3)SRAM的容量也很大。在ARM部分有16KB的在片高速SRAM和2MB的外部SRAM;在C5000DSP部分有72KW高速在片SRAM和64KW外扩程序SRAM和64KW外扩数据SRAM;在C2000DSP(TMS320LF2407)部分有2.5KW的在片SRAM,而且还有64KW外扩程序SRAM和64KW外扩数据SRAM。这样,大量的SRAM可以保证处理器在SRAM中读取程序,以保证程序快速运行。
(4)系统的I/O端口资源丰富。既有数字量的输入输出,也有模拟量的输入输出;既提供了串行方式,也提供了并行方式。为数据采集、控制指令输出、与上位机通信等奠定了硬
件基础。
(5)C2000DSP的处理器TMS320LF2407是专用来进行电机控制的芯片,用来产生PWM信号和捕获转速反馈信号很容易,而且运算速度快,可以实现对电机的各种高效复杂的控制。
(6)各部分间需要实时交换数据,其硬件上都采用了共享存储器的方式(ARM与C5000DSP之间的ARMPortInterface,简称API,C5000DSP与C2000DSP之间的FIFO)。这样,通信速度很快,从硬件上满足了实时要求。
(7)因为器件数量较多且速度相对较高,有些芯片采用的是先进的BGA(BallGridArray)封装技术,所以在设计印刷电路板时,采用了6层板,布线充分考虑了器件的高速性和封装技术。
(8)该系统平台提供了很多可扩展的接口,用户可针对具体对象扩充硬件、添加新的功能。对于构成SMSC2000轮机模拟器的其他工作站,无须扩展任何I/O接口,可见该系统具有通用性。
ARM+DSP嵌入式仿真平台的软件结构
ARM部分中的软件
ARM部分是整个系统的控制中心,其运行的主要是系统软件,包括自举加载程序、指令响应程序、键盘扫描程序、LCD显示驱动程序、A/D与D/A转换控制程序、直接数字量/开关量输入输出程序、CAN总线通信控制程序及与C5000DSP部分进行内部实时数据交换的控制程序。
自举加载程序是上电或复位后首要实现的任务。它先对ARM的一些关键寄存器(如时钟、中断等)进行初始化(即部分初始化);之后将ARM部分中要运行的主程序和各个子程序(如指令响应程序、键盘扫描、LCD显示驱动等)从片外的非易失性存储器FLASH中加载到片内或片外的SRAM中,以增加程序的运行速度;接着,开始负责对C5000DSP部分进行复位初始化,再把数学模型程序通过API控制加载到C5000DSP中。这样,自举加载程序就完成了两个部分的自举加载工作。
自举加载完成后,ARM部分开始执行系统的全部初始化,然后便进入系统的主程序(该主程序是一个无限循环等待程序),在主程序中再以中断方式反复运行键盘扫描、LCD显示驱动、指令解释响应、A/D与D/A转换控制、数字量/开关量的输入输出及与C5000DSP部分通讯的程序。其中,指令解释的响应程序是一个核心程序,类似于操作系统的内核程序,接受来自输入处理子程序(键盘扫描、数字量/开关量的输入等)的接口数据,并根据它们的值启动相应的任务,如果需要将任务执行的结果作为接口数据(指令)输出给显示或控制处理子程序,则经由各输出子程序再进行处理。该部分的软件组织结构如图4所示。
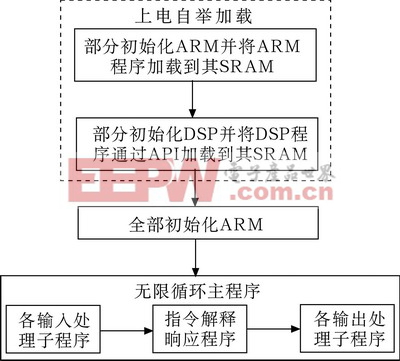
图4 ARM部分的软件组织结构
C5000DSP部分的软件
C5000DSP部分主要用来运行推进系统的数学模型,该推进系统可以是传统的柴油主机推动系统,也可以是新型的电力推动系统,关键在于不同的推动类型对应不同的数学模型。
C5000DSP程序实质上是以实时循环迭代求解微分方程组为主的程序,该微分方程组即推进系统的数学模型,并且每循环求解一次,要确定有没有从ARM部分传递来的指令及参数更改的信息。如果有,就改变相应状态及参数再求解微分方程组;如果没有,则仍按上一次的状态和参数求解。在每个循环中,方程组完整求解一次,从而得到推动系统在该时刻的仿真数据。在每个循环的最后,把仿真数据结果传送给ARM部分及C2000DSP部分(通过FIFO),用于显示和控制。这部分的软件程序结构如图5所示。

图5 C5000DSP部分的软件组织结构
C2000DSP部分的软件结构
C2000DSP部分的主要任务就是读取FIFO接收来自C5000DSP部分的仿真结果中的转速和转矩信号,并将之表达为电动机的相应转速和转矩。该部分实际上是独立构成的一个专门控制交流电机的子系统。
其中,C2000DSP处理器TMS320LF2407为该控制子系统的核心。它首先采用查询的工作方式,检测主控指令位是否指示打开该进程,检查系统与主电路是否正常。如果主控指令位指示“关闭”,则切断主电路,封锁输入输出,再关闭系统;如果不正常,则
仿真 平台 开发 实时 核心 DSP 嵌入式 系统 ARM 相关文章:
- 在采用FPGA设计DSP系统中仿真的重要性 (06-21)
- 数字频率合成器的FPGA实现(08-07)
- 基于DSP的导弹仿真器嵌入式组件设计(04-30)
- 如何将DSP和MCU两者完美结合(08-10)
- 高性能仿真器与开发包加速普及DSP应用开发(11-22)
- 基于DSP内嵌PCI总线的卫星信号仿真器设计(04-17)