单片机典型案例开发(一)
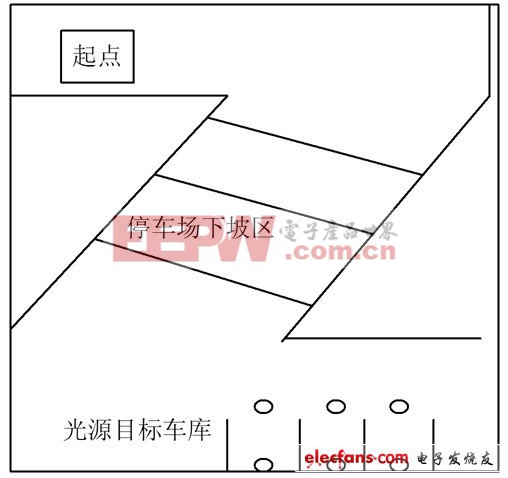
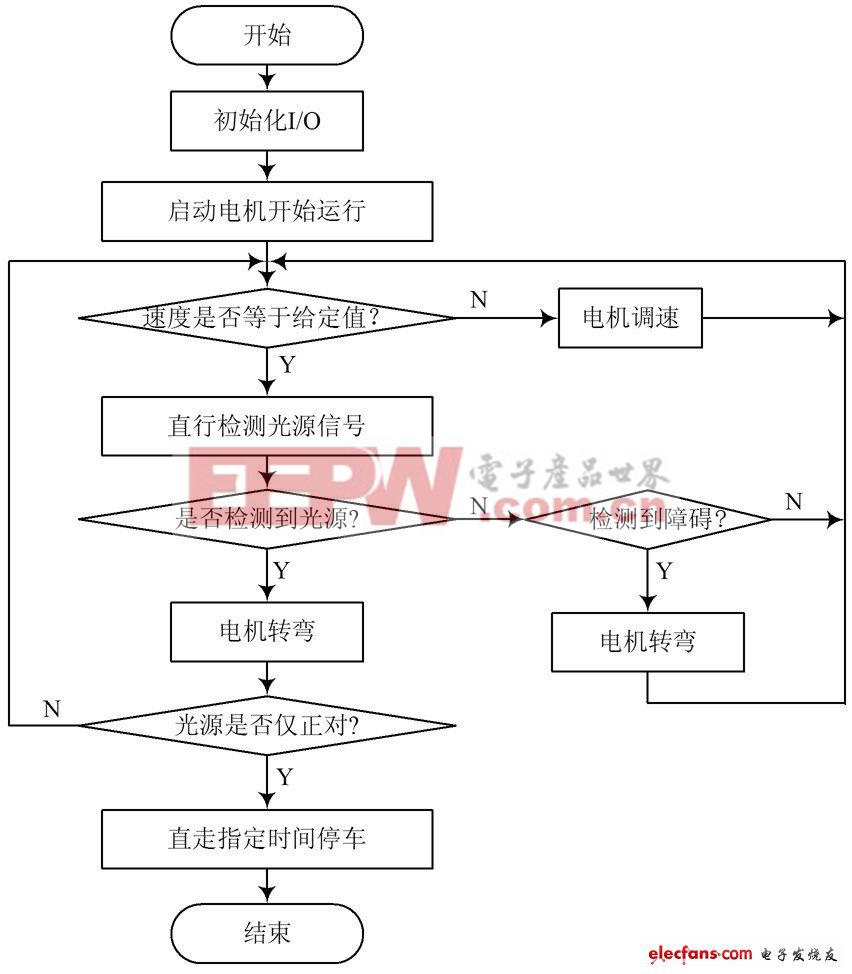
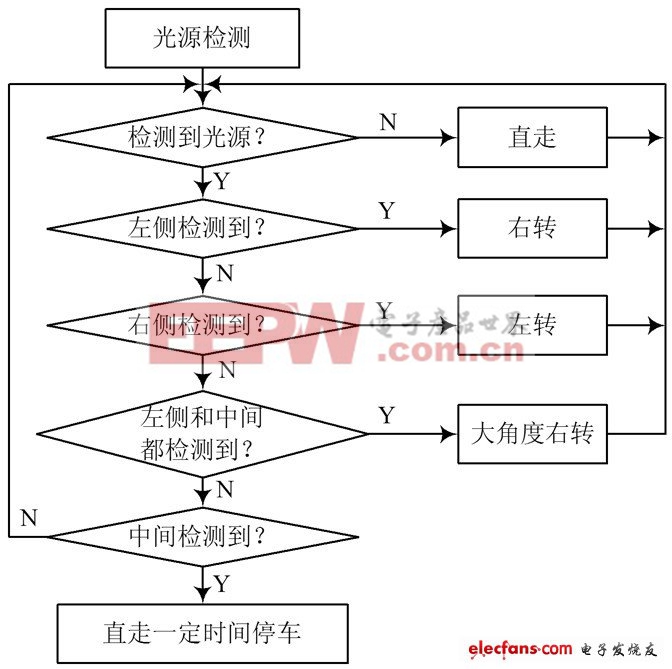
E测速电路设计 霍尔传感器A44E在测速系统中的主要作用是车轮转速采集。车轮每转一周,磁铁经过A44E一次,A44E的第3脚就输出一个脉冲信号,脉冲信号的周期与电机的转速有下列关系: 式中:n为电机转速;P 为电机转一圈的脉冲数;T 为输出方波信号的周期。 脉冲信号作为单片机AT89C52的外中断信号,从P3.2口输入。 1.4 电机驱动电路设计 动作执行单元为驱动小车左右轮的两个减速直流电机,控制它们的转速,就控制了小车的运动状态。但是由动作控制单元发出的控制信号非常微弱,无法直接驱动直流电机,须匹配设计合理的驱动电路,常用的驱动电路为H 桥。在设计过程中发现,由于三极管导通、关断的时间不统一,导致用三极管搭建的H 桥在电机电流换向的时候经常发生微短路,使得三极管发热现象很严重,整个电路电源波动很大,非常耗电。因此,本设计最终采用了集成H 桥L298.除此之外,在设计过程中发现电机转动产生的反向电动势会严重影响传感器的输出状态,将错误的路径信息送给处理器,导致小车经常产生错误动作。因此,本设计采用了双电源供电,即传感器和芯片共用一组电源,电机专用一组电源,中间信号的传输采用了4N25光耦电路进行电气隔离。 1.5 光源引导电路设计 本设计采用光敏三极管作为光源检测传感器,因为其感光电压变化明显(电压值变化在60~100mV 左右),价格便宜。光源引导模块需要在小车前方安装3个光敏三极管,通过车库发出的光源信号来引导小车到指定车库停车,使用LM324作为光源引导模块的核心放大器件,将信号进行放大处理。 1.6 停车场系统设计 为了更好地完成小车避障、光源引导和入库过程,停车场系统设计也是十分重要的。停车场系统设计图如图2所示。 图2 停车场系统设计图 2 软件设计 系统软件设计在Keil C51 集成开发环境下进行。软件主要包括系统主程序、避障子程序、光源引导子程序和测速限速子程序等。泊车系统整体流程如图3所示,避障程序流程图、光源引导程序流程图分别如图4,图5所示。测速限速电路软件设计思路是将每圈的时间换算成速度,再与设定的速度比较,如果所测速度大于设定值,则控制电机减速到设定值;如果所测速度小于设定值,则控制电机加速到设定值,完成小车的智能限速。 图3 智能泊车系统总体流程图 各模块连接:小车舵机左转输入端接P3.4;小车舵机右转输入端接P3.5;小车驱动电机前进输入端接P3.6;小车驱动电机后退输入端接P3.7;光电避障模块左传感器输出端接P1.0;光电避障模块右传感器输出端接P1.1;光源引导模块左传感器输出端接P1.2;光源引导模块中间传感器输出端接P1.3;光源引导模块右传感器输出端接P1.4。 小车整体测试:把小车放在停车场入口处,打开小车电源,打开车库中对应车库位置的光源电源,小车避开障碍通过停车场下坡区,到达指定车库前面,依靠光源引导入库,停车。 图4 避障程序流程图 图5 光源引导程序流程图 4 结 论 本文设计的智能泊车系统可以在实验室内实现小车的自动驶入指定停车位的功能。将小车停在停车场入口处,然后车主可以离开小车,此时小车就可以根据停车场内的车辆诱导信号(光源引导信号)将车引入停车场,从而实现自动泊车过程。 四、基于单片机的LED显示数字电压表 1 引言 单片机是一种集成电路芯片,随着计算机在社会领域的渗透, 单片机的应用正在不断地走向深入,同时带动传统控制检测日新月益更新。在实时检测和自动控制的单片机应用系统中,单片机往往是作为一个核心部件来使用,仅单片机方面知识是不够的,还应根据具体硬件结构,以及针对具体应用对象特点的软件结合,以作完善。由于单片机具有简单实用、高可靠性、良好的性能价格比以及体积小等优点,已经在各个技术领域得到了迅猛发展。数字电压表(Digital Voltmeter)简称DVM,它是采用数字化测量技术,把连续的模拟量(直流输入电压)转换成不连续、离散的数字形式并加以显示的仪表。传统的指针式电压表功能单一、精度低,不能满足数字化时代的需求,采用单片机的数字电压表,由精度高、抗干扰能力强,可扩展性强、集成方便,还可与PC进行实时通信。目前,由各种单片A/D 转换器构成的数字电压表,已被广泛用于电子及电工测量、工业自动化仪表、自动测试系统等智能化测量领域,示出强大的生命力。与此同时,由DVM扩展而成的各种通用及专用数字仪器仪表,也把电量及非电量测量技术提高到崭新水平。本设计重点介绍单片A/D 转换器以及由它们构成的基于单片机的数字电压表的工作原理。 2 总体设计方案 2.1 设路计思路 按系统功能要求,决定
3 各模块测试及连接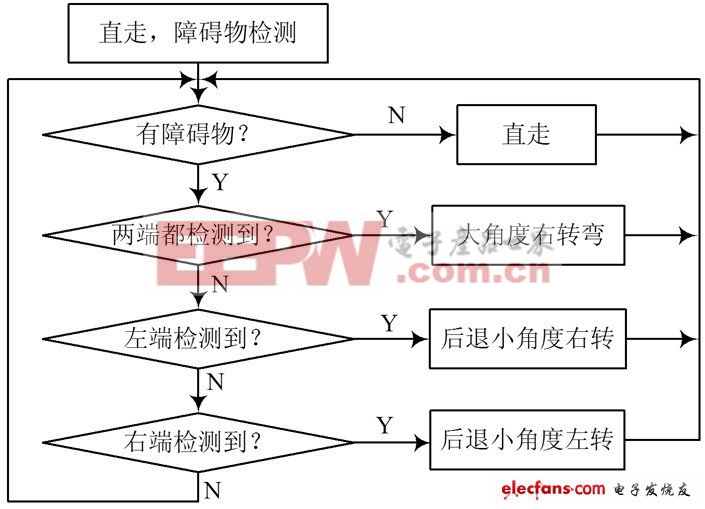
- 嵌入式软件设计中查找缺陷的几个技巧(03-06)
- 基于算法的DSP硬件结构分析(04-02)
- Windows CE下驱动程序开发基础(04-10)
- DSP+FPGA在高速高精运动控制器中的应用(05-17)
- 基于USB接口和DSP的飞机防滑刹车测试系统设计(05-19)
- 一种基于DSP平台的快速H.264编码算法的设计(05-19)