单片机典型案例开发(一)
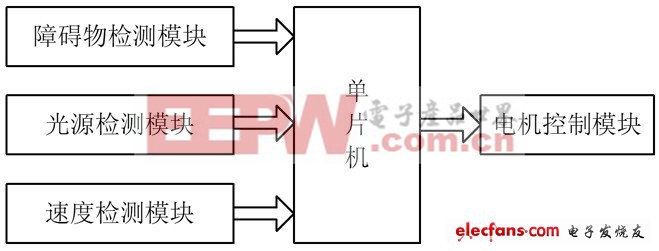
温度补偿电路的设计如图6所示,数据输入/输出脚连接到单片机的P0.1脚,电源接口接入+5 V的电压,外加5.6 kΩ的上拉电阻,因为DS18B20是单总线温度传感器,数据线是漏极开路,如果DS18B20没接电源,则需要数据线强上拉,给DS18B20供电;如果DS18B20接有电源,则需要一个上拉即可稳定的工作。由于DS18B20在使用中不需要任何外围元件,全部传感元件及转换电路集成在形如一只三极管的集成电路内,检测的温度值在内部进行转换,温度测量结果直接以数字信号输出,单片机对由DS18B20输出的信号进行读取,经过软件对温度数字值实现处理。 图6 温度补偿电路 该系统主电路原理图如图7所示,单片机采用89C52系列,单片机使用外部时钟源,外接6MHZ的晶振,由P0.0口直接输出40 KHZ的驱动信号给放大电路。接收到回波后,经由CX20106的滤波,产生中断信号,并由p3.2口输出进行中断。显示电路采用简单实用的3位数码管,连接单片机AT89C52的P0口,而三极管连接P2口,作数码管的位选。工作时,首先将系统初始化,启动计时器。并由P0.0脚发出40KHZ的驱动信号,同时打开INT0中断,并且开始等待接收到的回波和中断信号,若接收到回波(单片机接收到中断信号),计时器停止计时,保存时间信息,并且根据温度补偿计算出当前环境下的声速,计算出当前待测距离后储存,并调用显示子程序。测出距离后结果将以十进制BCD码方式传送到LED显示,然后再发超声波脉冲重复测量过程。 图7 超声波测距主电路图 3 结论 经过实测,本测距仪能够迅速的测出250 m以内的短距离障碍物,在30-200 cm范围内,误差能控制在1 cm以内,本设计具有简单实用,能耗低,成本低等特点。经过实际测试,发现系统的精度能满足普通需求,若需要进一步提高精度,可采用精度更高但系统更加复杂的双频超声波测距的方法。 三、基于单片机的智能泊车系统设计方案 摘 要:一个有效的智能泊车系统,不仅能帮助驾驶者快速、安全地完成泊车操作,从而减轻驾驶员负担,减少交通事故,而且能够有效提高汽车的智能化程度,增加汽车的附加值,从而带来巨大的经济效益。使用AT89C52单片机作为小车的主控制器,在该控制器基础上,添加了光电避障电路、测速电路、光源引导电路和电机驱动电路,从而实现了智能泊车系统设计。该系统结构简单、成本低,并在实验室中取得了预期的效果,能够使小车进入指定的停车位。 0 引 言 随着我国汽车数量逐年急剧增多,泊车位、停车场的数量却跟不上其增长的步伐,越来越多的人为如何泊车而发愁。日益拥挤的泊车环境要求人们对汽车的泊车技术更加地娴熟,这就更加重了人们工作之外的紧张情绪,降低了人们的生活质量。因此,如何解决泊车过程中的不便利,消除安全隐患,迅速、准确、安全地将汽车停靠到合适的位置,逐渐引起了人们的关注。 1 系统的工作原理及功能 智能泊车系统可分为控制部分和信号检测部分。 其中信号检测部分包括障碍物检测模块,光源检测模块和速度检测模块;控制部分包括控制器模块,电机控制模块。智能泊车系统基本模块方框图如图1所示。 图1 智能泊车系统基本框图 系统工作原理如下:在小车启动之后,通过霍尔传感器A44E进行小车的速度检测,对小车进行智能限速,小车行进过程中通过红外光电传感器避障,车库系统发送光源指示信号,光敏三极管接收车库指示信息,使小车到达指定车库后,停车。 1.1 单片机最小系统设计 AT89C52是51系列单片机的一种,是一个低功耗,高性能,CMOS 8位单片机,片内含8KB的可反复擦写的FLASH只读程序存储器和256B的随机存取数据存储器(RAM),由ATMEL公司采用高密度、非易失性存储技术生产,兼容标准MCS-51指令系统,片内置通用8位中央处理器和FLASH存储单元,片内有ROM/EPROM,因此,这种芯片构成的最小系统简单可靠,只要将单片机接上时钟电路和复位电路即可。 1.2 避障电路设计 红外光电式传感器具有非接触、响应快、性能可靠、体积小、安装轻便等诸多特点,因此在工业自动化装置和智能小车中获得广泛应用。本设计中采用的光电避障传感器是HS0038B.红外光电接收电路工作原理为:当接收到载波频率为38kHz的脉冲调制信号时,首先,HS0038B内的红外敏感元件将脉冲调制红外光信号转换成电信号,再由前置放大器和自动增益控制电路进行放大处理,然后通过带通滤波器进行滤波,滤波后的信号由解调电路进行解调,最后由输出电路进行反向放大并输出低电平;未接收到载波信号时,电路则输出高电平。红外发射电路由555定时电路产生方波,对红外发射管进行调制。 1.3 A44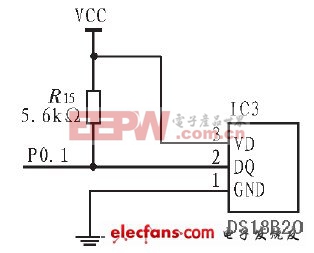
2.5 主电路原理图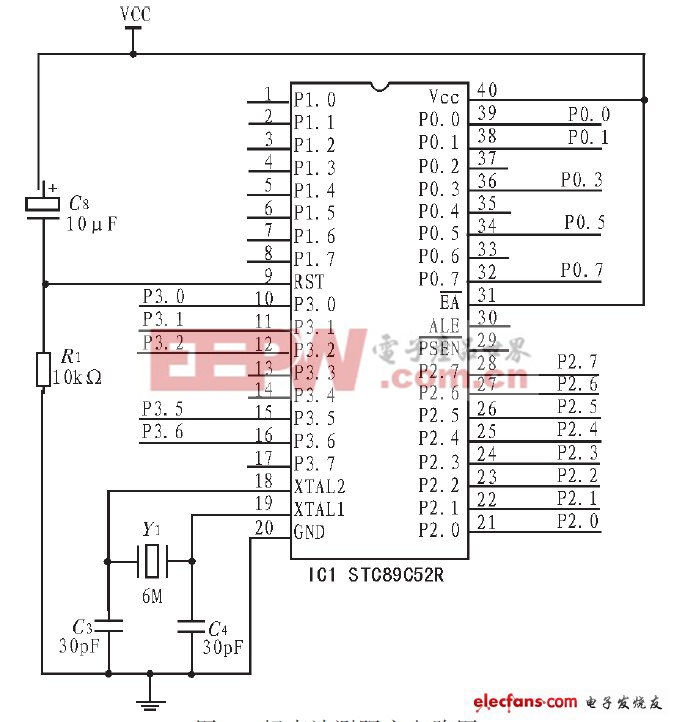
- 嵌入式软件设计中查找缺陷的几个技巧(03-06)
- 基于算法的DSP硬件结构分析(04-02)
- Windows CE下驱动程序开发基础(04-10)
- DSP+FPGA在高速高精运动控制器中的应用(05-17)
- 基于USB接口和DSP的飞机防滑刹车测试系统设计(05-19)
- 一种基于DSP平台的快速H.264编码算法的设计(05-19)