基于DSP和CPLD的光纤陀螺信号采集系统设计
摘要:随着光纤陀螺在空空导弹中的广泛应用,为了对其特性进行深入研究,设计了一种光纤陀螺信号采集系统。硬件结构采用了DSP+CPLD的方式,控制AD芯片完成多路光纤陀螺数据的采集。为了降低干扰对采集精度的影响,在硬件以及软件方面进行了抗干扰设计。通过对该系统的测试验证,性能指标满足使用要求。本系统设计新颖、实用,操作简单快捷。
关键词:光纤陀螺;DSP;CPLD;信号采集系统
0 引言
光纤陀螺作为一种新型的惯性器件,近年来得到越来越多的关注,因为它有许多其他陀螺无法比拟的优越性,比如结构简单,精度高,动态范围大,抗电磁干扰,无加速度引起的漂移且成本低,可靠性好等。陀螺可以为载体提供准确的角速度和角位移等信号,完成对运动体的姿态和运动轨迹控制。其优良的品质使自身能够满足军工和民用对惯性器件苛刻的要求,并得到广泛的应用。
惯性器件的性能直接影响到控制系统本身的稳定性能,所以光纤陀螺被应用到空空导弹中时,需要对陀螺的特性有充分的了解,为此构建了一个陀螺采集系统,以实现对陀螺信号的采集及特性分析。
1 光纤陀螺的工作原理
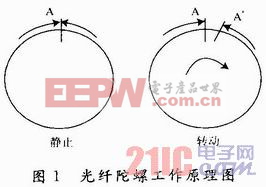
光纤陀螺是激光陀螺的一种,其基本原理基于Sagnac效应,即用光纤绕制成环柱形光路,光源发出的光经过分束器分为两束之后,送到光纤中,随着陀螺的转动,分别沿顺时针和逆时针方向传输,经过一周后,这两束相反方向传播的光回到分束器中形成干涉,当光纤形成的环状回路不转动时,顺、逆光程到达分束器的时间相等,两束光的相位差为零;当环状回路转动时,顺、逆光程就产生差异,在一段时间内分束器已从A点转到了A’点,对顺时针传播的光束,当它再次到分束器时多走了AA’的路程(如图1所示)。可以根据两束光的相位差来获得回路转动的角速度。光纤的检测灵敏度和分辨率比激光陀螺提高了几个数量级。
本文设计的信号采集系统通过双口RAM实现上位机与DSP的通信,控制板采用DSP+CPLD的方式,控制AD芯片完成多路光纤陀螺数据的采集。系统工作流程为DSP接收到上位机通过双口RAM传来的采集指令,通过地址/数据总线与CPLD进行通信,控制AD芯片对外部的多路陀螺信号进行采集,之后通过双口RAM送到上位机,上位机实现各种图形界面操作和后端信号处理,对所采集的信号进行分析。系统原理框图如图2所示。

3 系统硬件结构
系统主要由DSP芯片TMS320F2812、双口RAMCY7C131,CPLD芯片EPM7128T1100、ADC芯片ADS8364以及传感器信号调理电路组成。
DSP主要负责与上位机通信,以及和CPLD共同控制AD实现对多路光纤陀螺数据的采集,这里选用TI公司生产的TMS320F2812。该芯片专门为控制系统应用而设计,它采用1.8 V的内核电压,具有3.3 V的外围接口电压,片内存储容量为18 KB SRAM,128 KB FLASH,最高主频150 MHz,片内集成有多种外设接口。
双口RAM主要输出数据采集指令并接收DSP传送的陀螺值。选用的双端口RAM型号为CY7C131,采用5 V供电,容量为1K×8 b,实际使用数据交换区为256×8 b。在256 B的存储空间内分为两个数据区,一个数据区(A)存放上位机下发的指令信息,另一个数据区(B)存放采集的陀螺数据信息。由于控制DSP与上位机对双口RAM的读写速度不同,为防止由于速度不匹配造成的读写冲突,在软件中相应的存储区设置读写标志位,通过此标志位来确定双端口RAM的读写状态。
在本系统中,CPLD是一个重要的组成部分,由CPLD组成的逻辑控制模块接收DSP传送过来的动作命令,控制AD某通道进行数据采集。这里选用Altera公司的EPM7128芯片。CPLD作为一个单独的控制执行结构,通过编写相应VHDL代码,即可生成相应的操作电路,实现对各种输入信号的锁存、判断和对控制信号的执行。
A/D转换芯片选用TI公司的高速、低功耗、六通道同步采样的16 b转换器ADS8364,可保证采样精度达到12位以上。芯片内部包含六个采样保持器,可保证六路信号同时采样;信号输入范围为0~5 V,最大转换速度250K,可以满足电位计、旋变信号采集速度和精度的要求。并且数字逻辑电平为3.3 V。考虑到数据采集处理系统的采样频率一般较高,如果用DSP直接控制ADS8364的访问,将占用DSP较多的资源,同时对DSP的实时性要求也较高。因此在本系统设计中,用CPLD实现ADS8364的接口控制电路。
陀螺模拟信号是-5~+5 V差分信号,通过信号调理,转化到0~5 V之间。当转速低的时候,因受系统影响信号上有毛刺,需要进行滤波,设计一个RC低通滤波电路去掉高频干扰即可。
4 系统软件流程
系统中DSP软件代码主要由两部分组成:与上位机通信和对陀螺信号的采集。软件开发在CCS3.1(Code Composer Studio)中进行。TMS 320F2812的主程序流程如图3所示。
采集 系统 设计 信号 陀螺 DSP CPLD 光纤 基于 相关文章:
- 基于Linux的便携式RFID信息采集处理系统 (07-03)
- 一种基FPGA和DSP的高性能PCI数据采集处理卡设计(08-26)
- 基于LabVIEW的USB实时数据采集处理系统的实现(03-26)
- 基于DSP和USB的高速数据采集与处理系统设计(05-01)
- 基于DSP的图象采集与处理系统的设计(06-15)
- 基于DSP的信号采集处理系统(07-21)