电动小车的电机驱动及控制
LMD18200是美国国家半导体公司推出的专用于直流电动机驱动的H桥组件,同一芯片上集成有CMOS控制电路和DMOS功率器件。此种芯片瞬间驱动电流可达6A,正常工作电流可达3A,具有很强的驱动能力,无“shot-through”电流,而且此种芯片内部还具有过流保护的测量电路,只需要在LMD18200的8脚输出端测出电压和给定的电压比较即可保护电路过流,从而实现电路的过流保护功能。由LMD18200组成的电机驱动电路如图5所示。LMD18200的5脚为PWM 波输入端,通过改变PWM的占空比就可调节电机的速度,改变3脚的高低电平即可控制电机的正反转。此电路和以上几种驱动电路比较具有明显的优点,驱动功率大,稳定性好,实现方便,安全可靠。

2 .P W M 控制
PWM(脉冲宽度调制)控制,通常 配合桥式驱动电路实现直流电机调速, 非常简单,且调速范围大,它的原理就 是直流斩波原理。如图1所示,若S3、S4 关断,S1、S2受PWM控制,假设高电平 导通,忽略开关管损耗,则在一个周期 内的导通时间为t,周期为T,波形如图 6,则电机两端的平均电压为: U=Vcc t/ T=αVcc ,其中,α=t/T称为占空比,Vcc为电源电压(电源电压减去两个开关 管的饱和压降)。
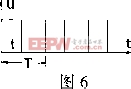
电机的转速与电机两端的电压成比例,而电机两端的电压与控制波形的占空比成正比,因此电机的速度与占空比成比例,占空比越大,电机转得越快,当占空比α=1时,电机转速最大。
PWM控制波形的实现可以通过模拟 电路或数字电路实现,例如用555搭成的触发电路,但是,这种电路的占空比不能自动调节,不能用于自动控制小车的调 速。而目前使用的大多数单片机都可以直接输出这种PWM波形,或通过时序模拟输出,最适合小车的调速。我们使用的是凌阳公司的SPCE061单片机,它是16位单片机,频率最高达到49MHz,可提供2路PWM 直接输出,频率可调,占空比16级可调,控制电机的调速范围大,使用方便。SPCE061单片机有32个I/O口, 内部设有2个独立的计数器,完全可以模拟任意频率、占空比随意调节的PWM信号输出,用以控制电机调速。
在实际制作过程中,我们认为控制信号的频率不需要太高,一般在400Hz以下为宜,占空比16级调节也完全可以满足调速要求,并且在小车行进的过程中,占空比不应该太高,在直线前进和转弯 的时候应该区别对待。若车速太快,则在 转弯的时候,方向不易控制;而车速太慢,则很浪费时间。这时图6可以根据具体情况慢慢调节。在2003年“简易智能电动车”的实际制作中,我们的小车驱动信号的占空比一般在8/16以下。
3.通过软件避免直通短路
从前面的分析可知,桥式驱动电路中,由于开关管有开通和关断时间,因此存在上下桥臂直通短路的问题。直通短路的存在,容易使开关管发热,严重时烧毁开关管,同时也增加了开关管的能量损耗,浪费了小车宝贵的能量。由于现在的许多集成驱动芯片内部已经内置了死区保护(如LMD18200),这里主要介绍的是利用开关管等分立元件以及没有死区保护的集成芯片制作驱动电路时增加死区的方法。
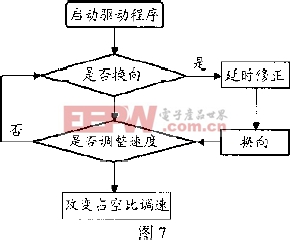
死区时间的问题,只有在正转变为反转的时候才存在,而在正转启动或反转启动的时候并没有,因此不需要修正。如果开关管的开通和关断时间非常小,或者在硬件电路中增加延时环节,都可以降低开关管的损耗和发热。当然,通过软件避免直通短路是最好的办法,它的操作简单,控制灵活。通过软件实现死区时间,就是在突然换向的时候,插入一个延时的环节,待开关管关断之后,再开通应该开通的开关管。图7为利用软件修正死区时间的流程图,在开关管每次换向的时候,不立即进行方向的切换,而是先使开关管关断一段时间,使其完全关断后再换向打开另外的开关管。这个关断时间由单片机软件延时实现。
4.总结
以上主要分析了电机的全桥式驱动电路,这是直流电机调速使用最多的调速方法。目前市场上有很多种电机驱动的集成电路,效率高,电路简单,使用也比较广泛,但是其驱动方法大多与全桥式驱动一样。PWM控制方法配合桥式驱动电路,是目前直流电机调速最普遍的方法
- 技术控做的玩具就是酷,小车跷跷板平衡控制系统设计,完整解决方案(06-04)
- 轮式移动机器人的循迹设计(10-15)
- 基于双核多接口的智能汽车控制系统设计方案(04-07)
- 基于神经网络的无位置传感器无刷直流电机驱动(一)(06-04)
- 变形机翼分布式超声电机驱动的应用设计方案(12-21)
- Σ-Δ调制器提高运动控制效率设计方案(12-20)