变形机翼分布式超声电机驱动的应用设计方案
一、项目提出的背景和必要性
变形飞行器(Morphing Aircraft)通过自主改变飞行器的外形来改变飞行器的气动性能,以适应不同的飞行条件,从而扩展其飞行包线和改善其操作特性,减小阻力,加大航程,减少或消除颤振、抖振和涡流干扰等的影响,从而更有效地完成各种飞行任务。在飞行器的所有部件中,机翼对飞行器的升阻比、极限速度、机动性、操控及稳定性、经济以及安全性等有极其重要的影响。变形机翼可以根据飞行任务和流场条件要求,通过精确的主动变形,始终保持飞行所需的最佳形状,从而保证较高的气动操纵效率。
实现机翼外形大尺度变化的关键技术之一就是变形驱动机构及其控制电路的设计。在本项目中,我们采用分布式超声电机来改变机翼的弯度,对高弹性柔性蒙皮、超声电机驱动的变形系统、传感器等进行无缝一体化设计,从而避免机翼气流分离现象的发生。
超声电机是利用压电陶瓷的逆压电效应和超声振动的新型微特电机,具有转矩重量比大、高精度、断电自锁等优点,其结构如图1所示。驱动超声电机必须施加一定功率的超声频段的交流信号给定子上的两相压电陶瓷元件,使其产生同频异相的驻波,并叠加成单一旋转行波模态,最后通过定子与转子之间的摩擦作用驱动转子运动。因此对驱动信号的频率、相位和幅值都具有一定的要求,在本项目中我们采用PSoC芯片来实现对驱动信号的处理。
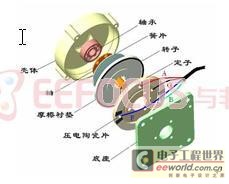
图1 TRUM-40电机结构图
PSoC芯片抛弃使用分立的逻辑器件搭建驱动和控制电路,将频率发生、分频分相、死区调节和部分驱动电路以及控制电路等整合到PSoC中,大大减小了驱动器的复杂程度,同时满足了驱动器的基本控制要求,可以通过调频来调节电机转速。另外,采用PSoC芯片强大的通信功能,实现了多台分布式超声电机的协调驱动,自适应地改变机翼外形,从而大大降低了机翼控制系统的复杂度。图2所示为单台超声电机的PSoC驱动电路框图。
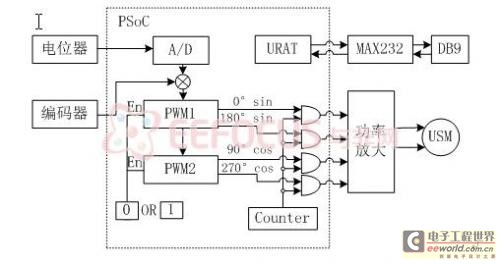
图2 超声电机PSoC驱动电路控制框图
目前,在许多单片机应用系统中,上、下位机分工明确,单片机和上位机之间的数据通信是整个系统的基础。本项目的上位机为PC机,为了使用电脑控制超声电机的运行状态,采用了常用的RS-232串口通信电路给PSoC发送控制指令,然后用VB语言编写了相关程序和控制界面。
二、创新性
本项目首次提出采用PSoC芯片来驱动变形机翼的分布式超声电机,从而实现了多台超声电机的协调控制和机翼外形的自适应调节。
三、研究基础
1、现阶段已经完成机翼变形机构的设计,如图3所示。项目中选用TRUM-40电机作为变形机翼的驱动器,采用防尘SMD型12mm尺寸型旋转位置传感器测试变形角度变化,采用欧姆龙D2MQ-4L-1-L限位开关控制变形边界。目前已顺利进入驱动器控制部分设计阶段。

图3 变形机翼的机械结构图
变形机翼超声电机驱动PSo 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)