基于神经网络的无位置传感器无刷直流电机驱动(一)
无刷直流电机的控制是根据转子磁极位置向电枢通以电流来实现的,从而需要依靠旋转编码盘或者其他传感器来检测转子的位置。随着小型化,低成本和可靠性的趋势,要求无刷直流电机(BLDC)的驱动采用无位置传感器的需要越来越大。确实有一些这类的方法[1,2],但是很少有方法能有效解决磁路的非线性,电机参数的波动和其他问题。
关于感应电机,一些使用了神经网络的驱动方法曾被提出[3,4]。另一方面,至于BLDCM,也有一些在仿真阶段的研究[5,6],但他们的有效性还没被真实的电机实验证实过。
在这项研究中,我们提出和评估了一种使用神经网络(NN)的无位置传感器的驱动方法,特别的,他们描述非线性系统和一般化的能力是通过训练得到的。在第二章,解释了BLDCM的运行原理和无位置传感器驱动的概念。在第三章,我们提出了基于神经网络的无位置传感器驱动方法,考虑了它的训练。第四章给出了实验的结果。我们展示提出的方法不仅具有良好的速度特性,其电压和电流小型也是合适的。在第五章,我们论证了通过参数波动的例子论证了NN的可能性。在结尾,我们给出了结论和今后研究的主题。
2 无位置传感器驱动
2.1 BLDCM模型
假设一个圆型的永磁感应电机被当作一个BLDCM,其转子磁场呈正弦分布。顺时针旋转被认为正方向。在这种情况下,在d-q坐标下的旋转方程如下[3]

在这里,vd和vq分别为d-和q-轴电枢电压分量,id和iq为d-和q-轴电枢电流分量,ed和eq为d-和q-轴由电枢电流通过永久磁场感应的电动势,P为微分运算符。因此,

由于d轴在d-q坐标下与磁系统产生的磁通方向一致,d-q坐标旋转速度和磁系统的旋转速度一样。因此,电压、电流和其它参数在d,q轴可以被当作直流量来看待。
电机扭矩在d-q轴上表示如下:

这里p代表极对数。
在公式(3)里面,KE受磁体温度的和饱和的影响,但不会发生太大改变。这样,电机扭矩可以通过iq控制。通过维持id=0可以实现最好的效果,因此取消与id相关的损失带来的影响。
2.2 无位置传感器控制
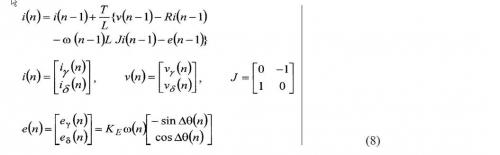
当无位置控制应用在BLDCM时,d-q轴的位置不确定,因此采用虚轴 上的位置和速度来替代,如图1所示。 一种估计这些量的方法描述如下。
首先,在d-q轴上旋转方程(1) 转换状态方程如下:

然后转换在轴上进行。该变换矩阵[c]是利用旋转产生的位置差得到的,如图1所示

将该转换矩阵应用于公式(4),在轴上得到如下状态方程:
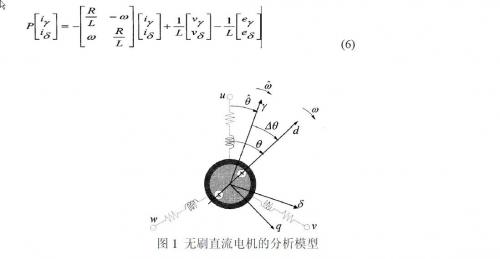
图1 无刷直流电机的分析模型
这里和为-和-轴电枢电压,和为-和-轴电枢电流,和为-和-轴电枢电流在永磁体中的感应电动势,并且

对公式(6)中的电流差分项应用欧拉近似,并且假设电枢电压 和 在采样期间为恒定,则对于采样周期T,在采样点n-1和n,可以用下面的离散状态方程描述:
因此,在 轴上的电动势e(n)包含了相位误差和速度信息。因此在 坐标上的位置和速度通过估算 坐标上的电动势和使用与相位误差和速度有关的信息,能被融合到d-q轴上的位置和速度。
一种估算 坐标上电动势e(n)的方法可以通过变换公式(8)得到,如下:

当得到电动势的估计值 后,用速度估计值 来代替未知速度 。用电动势的估计式(9)和位置误差估计值 以及速度 可以由下式得到:

利用公式(10)、(11),我们可以得到真实位置 (在d-q坐标)来修正 坐标下的位置 ,如下:

这里,K为渐近收敛的 的位置误差修正系数
。
类似的,收敛的真实速度 (在d-q坐标下)可以通过修正 坐标下的速度 得到,如下:

因此,真实的位置和速度可以通过估计 坐标下的电动势得到。事实上,然而,电机内部的磁路由于永磁体和和其他因素的影响是非线性的。这样,我们可以假设理论的估计包含了误差。此外,实际的电机参数也随着温度和其他条件而波动。我们尝试通过引入神经网络来处理这种估计误差,这种神经网络能够描述非线性系统和具有学习能力。无刷直流电机的无传感器控制是通过采用神经网络估计的电机的位置和速度来进行的。
3 运用神经网络的无位置传感器驱动
3.1 通过神经网络估计位置和速度
通过神经网络来考虑电动势的估计。我们通过引入下面的多变量的函数g,在 坐标下对电动势归纳方程(9),该函数包含电流i(n),i(n-1),电压v(n-1),和估计速度 :

我们提出一种通过神经网络来表示多变量函数和方法,这种方法被当作电动势估计的神经网络模型。速度和位置由(10)-(13)式计算。
至于神经网络的训练数据,最好的方法是用电机旋转的实际参数(电压,电流,速度)。因此,我们假定训练的数据是在实际运行过程中通过传感器得到的。装有传感器的电机被驱动后,电压、电流和速度等数据就被测得。通过改变速度参考获得
BLDC 无位置传感器无刷直流电机驱动 相关文章:
- AC电机 BLDC/PMSM 飞兆半导体(12-21)
- 在PSoC4平台上开发传感器BLDC电机控制系统(12-15)
- 安森美电机驱动器在家电中的应用(12-13)
- AVR微控制器在BLDC电机控制中的应用(12-11)
- 掌握驱动算法,玩转电机驱动(08-02)
- 飞兆半导体开发出创新型BLDC电机控制参考设计(06-29)