基于神经网络的无位置传感器无刷直流电机驱动(一)
时间:06-04
来源:互联网
点击:
的训练数据,我们可以期待神经网络的概括(一般化)能力有一种提高。
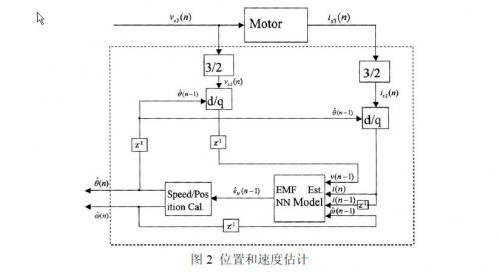
在一种神经网络训练方法中,将取的数据输入神经网络,当由(9)式估计的电动势和电动势估计的神经网络模型的输出相差足够小之前,训练的作用表现出来。经过训练后的神经网络估计的位置和速度见图2。
3.2 仿真
图2所示的位置/速度估算被纳入BLDCM控制系统来得到由图3所示的总体结构。
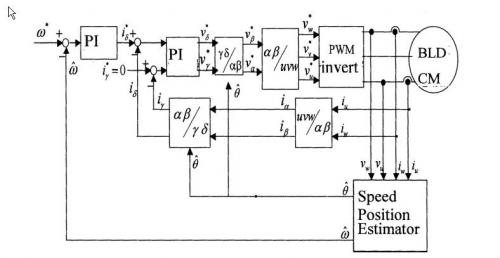
图3 无传感器驱动系统结构
在这个控制系统里面,PI控制被应用到速度和电流调节中。首先,在速度控制单元,根据参考速度 和估计速度 的差值来实现PI控制, 轴的参考电流 为输出,如下:

这里Kvp和Kvi分别为速度比例系数和速度积分系数。另外, 轴参考电流 保持0以得到最大的效率。然后 ,在电流控制环中也应用了PI控制,以使实际的 , 和期望的参考值相近。参考 , 由下式得到:

这里Kcp和Kci分别为电流比例系数和积分系数。
使用Matlab/Simulink仿真模型结构如图3所示。在电动势估计模型中设有7个输入层,14个中间层和两个输出层。获取训练数据的目的是处理参考速度和负载的波动。特别地,在扭矩为0.001,0.5,1.0 N-m,当参考速度从400→800→1200rpm,通过一个位置传感器驱动电机。由此而得到的三项训练数据单元然后被综合,神经网络从而得到如前所述的训练。直到训练数据期望的均方差下降到3.36403×10-3,训练才执行。经过这样的离线训练后,电动势估计的神经网络模型被合并到控制系统,当扭矩从0.1以0.1N-m的步进增加到1N-m(和训练时一样)时,进行仿真。仿真结果如图4.
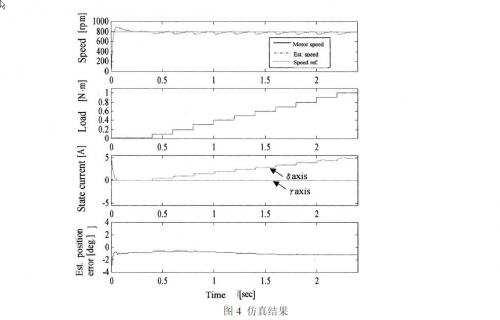
图4 仿真结果
BLDC 无位置传感器无刷直流电机驱动 相关文章:
- AC电机 BLDC/PMSM 飞兆半导体(12-21)
- 在PSoC4平台上开发传感器BLDC电机控制系统(12-15)
- 安森美电机驱动器在家电中的应用(12-13)
- AVR微控制器在BLDC电机控制中的应用(12-11)
- 掌握驱动算法,玩转电机驱动(08-02)
- 飞兆半导体开发出创新型BLDC电机控制参考设计(06-29)