AVR微控制器在BLDC电机控制中的应用
许多汽车应用,包括从最小的阀门到笨重的座椅,都含有运动部件,而速度可能从每分钟数十转到数千转不等。一直以来,有刷电机在汽车应用中占主导地位,因为它们成本低,而且只需简单的继电器就能加以控制。不过,有刷电机较重,而且电刷会产生噪声和电火花,并会随着使用时间的增加而磨损。
现代汽车中电机的数量在不断增加,因此制造商需要体积更小更轻、转矩和速度更高并受到精确控制的电机。防倾斜(anti-pitch)车窗升降电机就是一个很好的示例,其他还有刹车和转向助力、通风、冷却,以及推拉门等应用。另外,进气和涡轮增压器控制则是比较新颖的领域,这时电机及其控制器可能处于150℃的高温下,远远超过125℃的标准温度。
目前的无刷电机控制系统常常采用ASIC或分立组件产生和控制电机绕组的脉冲电压。功率MOSFET是常常用到的器件。要驱动MOSFET,就需要适配电路来将命令信号转换为适当的电平。新兴的解决方案之一是将微控制器(MCU) 和驱动组件相结合。简单MCU负责与汽车网络进行通信,并和以模拟模式控制电机绕组的复杂驱动器级一起工作。若采用专用MCU控制简单驱动器级,而以数字模式实现电机绕组控制,则可进一步提高控制回路的精度和速度。
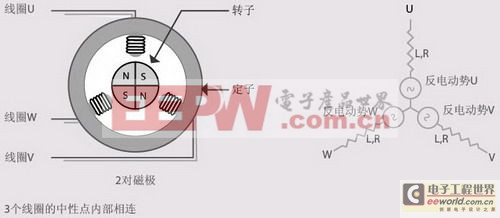
a) 三相电机结构 (b) 定子3绕组(线圈)电气表示
图1 无刷电机结构
无刷电机
我们这里提到的无刷电机是指无刷直流(BLDC)和无刷交流(BLAC)电机。这类电机因其旋转部件转子由永磁体制成,故又称为永磁同步电机(PMSM),如图1所示。由于永磁体的旋转产生反电动势,被传递到电机绕组的能量必须与反电动势同相,所以电机的供电系统必须与转子的位置同步。不过BLDC和BLAC电机非常类似,BLDC电机每个绕组的反电动势波形为梯形,因而所有绕组电压之和是连续的。BLAC电机每个绕组的反电动势是正弦波形,所有绕组电压的总和是多相AC电压。
鉴于此,我们可以得出结论:驱动BLDC电机需要梯形电压;而驱动BLAC电机需要正弦电压。
总之,BLDC电机为制造商带来了尺寸、重量和性能方面的好处,但目前存在一大挑战,即如何把成本降低到与旧式、较重产品相比更具有竟争力的价位。
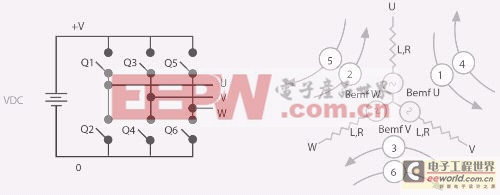
(a) 功率桥 (b) 线圈的电流行为
图2 无刷电机输出信号的产生
BLDC电机驱动方法
BLDC电机可带3个霍尔传感器,这些传感器和与转子位置相关的线圈U、V和W 3个电压保持同步。表1说明了哪个线圈必须按照霍尔传感器的指示被激活。电机的电气周期分为6个步骤,每一步都有一个霍尔传感器“值”。图2(a) 所示为功率桥的拓扑,图2(b)显示了每一步有哪些线圈被加电。例如,在步骤1期间,电压施加在电机的U和V输出端之间,从U流向V端的电流如图2(b)中的箭头1所示。
表1 霍尔传感器表
如霍尔传感器表所示,在每一步换向过程中,通过关闭两个开关在电机两个输出端之间施加电压。利用这种控制方式,电压将通过霍尔传感器与转子位置保持同步。事实上,在这一点上,BLDC 电机具有与DC电机相同的行为,其速度与电压成比例。然而,为了控制电机速度,系统会通过发送PWM信号激活开关,来调节施加的电压。V和W输出端产生“延时”±120°的类似波形。另外,还需注意步骤3和步骤6期间产生的反电动势(BEMF)。
无传感器电机
无传感器电机的控制同步化是通过在U、V、W这些输出端没有被激活(如U输出端的步骤3和步骤6)的步骤期间,监控U、V和W的反电动势信息来完成的,其中包含了反电动势零交叉点的检测,并可以借助模拟比较器或利用软件加ADC输入来完成,如图3所示。
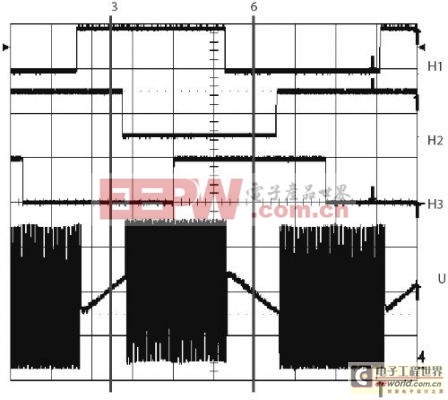
图3 BLDC电机在步骤3和步骤6期间的U相及其BEMF波形
AVR解决方案
AVR产品组合提供了能够驱动汽车、工业控制及白色商品的BLDC电机的各种平台。ATmega16/32/64M1是针对汽车应用而开发的,其中包括驱动DC或 BLDC/BLAC电机的功率级控制器、用于反电动势感测的模拟比较器(无传感器应用)、故障输入以及用于电流和电压测量的ADC等器件,对于上述的无刷电机控制系统能带来切实帮助。
- 基于AVR微控制器的多机系统(01-31)
- 基于神经网络的无位置传感器无刷直流电机驱动(一)(06-04)
- AC电机 BLDC/PMSM 飞兆半导体(12-21)
- 在PSoC4平台上开发传感器BLDC电机控制系统(12-15)
- 安森美电机驱动器在家电中的应用(12-13)
- 掌握驱动算法,玩转电机驱动(08-02)