����VC++�IJ���������Ʒ���̽��
���������һ�ֽ��������ź�ת��Ϊ��λ�ƻ��λ�Ƶĵ��������������Ŀ���ͨ�������û�����Ի�C���Խ����������������Ľ��SC3���������������ƽ��̨�Ŀ��ƿ���Ϊ����������һ�������Windowsƽ̨������VisualC++6.0�ṩ�Ĵ���ͨ�ſؼ�MSComm��ʵ��PC���벽�����������֮�������ͨѶ������ʵ����PC��ֱ�ӿ��Ʋ�������ķ���������ϸ�����˱�д����ͨ�ų���Ļ�������ͷ��������Խ����������ƵĿ��Ƴ�������������ɿ����Ҿ����Ѻõ��˻��������档
���������һ�ֽ�������ת��Ϊ��λ�ƵĻ���ʽ��ģת�������ڿ���ϵͳ�о���ʮ�ֹ㷺����;������ͳ�IJ�������Ŀ���ͨ�������û�����Ի�C���Խ���������������������VC++�ṩ�Ĵ���ͨ�ſؼ�MSCommʵ��PC���벽�����������֮��Ĵ���ͨ�š���DOS�´���ͨ�ų���ͬ���ǣ�Windows���ᳫӦ�ó���ֱ�ӿ���Ӳ��������ͨ��Windows����ϵͳ�ṩ���豸�����������������ݴ��͡����п���Win32������Ϊ�ļ������д����ģ�������ֱ�ӶԶ˿ڽ��в��������ڴ���ͨ�ţ�Win32�ṩ����Ӧ���ļ�I/O������ͨ�ź�����ͨ���˽���Щ������ʹ�ã����Ա��Ƴ����ϲ�ͬ��Ҫ��ͨ�ų���
ʵ�ִ���ͨ��һ����3�ַ�����ʹ��VC++�ṩ�Ĵ���ͨ�ſؼ�MSComm���ڵ��߳���ʵ���Զ���Ĵ���ͨ���ࣻ���߳���ʵ�ִ���ͨ�š����ʵ���������ϵͳ����VC++�ṩ�Ĵ���ͨ�ſؼ�MSComm������������̣����Ժܷ���ع�������Ƽ�������ڡ�
1��ϵͳ���
��PC�����Ʋ����綯����ϵͳ��ͼ1��ʾ��
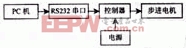
ͼ1PC�����Ʋ������ϵͳ��ͼ
��ϵͳ�ĵ�����Ʋ���ͨ�õ�RS232���ڵ��첽ͨ�š�����RS232������Ϊ�ٽ����õ绰�����������ͨ�Ŷ��ƶ��ı���������ƽ�Ե��ǶԳƵģ���TTL��MOS����ƽ��ȫ��ͬ����0��ƽ�涨Ϊ+5��+15V֮�䣬��1��ƽ�涨Ϊ-5��-15V֮�䣬��ˣ�RS232��������TTL��ƽ���ӱ��뾭����ƽת����
2��������Ӳ���ļ�������
��ϵͳ������������������˾������SC3���������������ƽ��̨��ʵ��ƽ��̨����ά���ƣ�x��y��z��������RS232�����첽ͨ����ɶԲ�������ĵ����������ƶ����ƣ����Ұѵ����ʵ��λ�����ݷ�����PC��������
���ƽ��̨�Ļ�еָ�����£�
��1�����ܵ����ת̨���ͺ�RSA200����x�ᡣת����Χ>��40�㣻������180��1��С����0.0003125�㣻̨��ֱ����200���ֱ���0.00125�㣻�ظ���λ����0.005�㣻����ٶ�25/s�����������60kg��
��2�������͵��ƽ��̨���ͺ�TSA300B������z�ᡣ��С����0.00315mm���ظ���λ����0.005mm���ӹ̶�ƽ��̨��Ч�г�Ϊ150mm��
��3�������͵��ƽ��̨���ͺ�TSA30C������y�ᡣ��С����Ϊ0.002mm���ظ���λ����0.005mm����Ч�г�30mm��SC3������������������ֶ���������ʽ���ֶ������õIJ����У��ٶ��趨����������������趨��λ�����趨�ȣ�������ʽ����ʹ������˶�ֱ����Ӧ���������ơ������ǽ��ж��ο��������Ӧ�ó������Ƕ��ԭ�������Ŀ���ָ�Э�顣
��ָ��ϵͳ��Ҫ�����¼�����
����ָ��ָ���ʽ������R"CHR$��13��
��ָ���200ms����SC3���ͣ���OK��CHR$��10������ʾ����ɹ���
��ѯָ��ָ���ʽ������V��CHR$��13��
SC3�ӵ���ָ�����ͣ���Vnumber��CHR$��10��������numberΪASC���ʾ��SC3��ǰ�ٶ�ֵ����Χ0��255��
�����ѯָ��ָ���ʽ������X��CHR$��13����Y��CHR$��13����Z��CHR$��13��
SC3�ӵ���ָ�����ͣ���X+number��CHR$��10������Xnumber��CHR$��10�������������ơ�����numberΪ��ASC���ʾ��SC3��ǰ����ֵ�������Ŵ�����ǰλ���ڿ���λ�ã�0λ�������������λ�á�
�ٶ�����ָ��ָ���ʽ����V��numberCHR$��13��
����numberΪ��ASC���ʾ���ٶ�����ֵ����Χ0��255��
����ָ��ָ���ʽ����HX��CHR$��13����HY��CHR$��13����HZ��CHR$��13��
SC3�ӵ�����ָ�����й����������ɹ����������ͣ���OK��CHR$��10������ʾSC3������ϡ�
��״̬��ѯָ��ָ���ʽ������H��CHR$��13��
SC3�ӵ�����ָ�����ͣ���H000��CHR$��10��
����000�ĺ��壺
��һλ��ֵ��1��ʾz�����ɹ���0��ʾz��δ���㡣
�ڶ�λ��ֵ��1��ʾy�����ɹ���0��ʾy��δ���㡣
����λ��ֵ��1��ʾx�����ɹ���0��ʾx��δ���㡣
����ָ��ָ���ʽ����Xdirectionnumber��CHR$��13����Ydirectionnumber��CHR$��13����Zdirectionnumber��CHR$��13��
3������ʵ��
3.1����VC++�ṩ�Ĵ���ͨ�ſؼ�MSCommʵ�ִ���ͨ��
���ȣ���VC++��5�ݵĶԻ����д���ͨ�ſؼ�����Control��������ȱ�ٸÿؼ�����ͨ���˵�Project��Addto��Project��ComponentsandControl���뼴�ɣ��ٽ��ÿؼ��ӹ����������Ի����С���ʱ����ֻ��Ҫ���Ŀؼ��ṩ�Ķ�Windowsͨ�����������API�����Ľӿڣ���ֻ��Ҫ���úͼ���MSComm�ؼ������Ժ��¼���
��ClassWizard��Ϊ�½���ͨ�ſؼ������Ա����CMSCommm_Serial����ͨ���ö������ԶԴ������Խ������ã�MSComm�ؼ�����27�����ԣ�������Ҫ������
Commport�����ò�����ͨ�Ŷ˿ںţ�ȱʡΪCOM1��
Settings�����ַ�������ʽ���ò����ز����ʡ���żУ�顢����λ��ֹͣλ��
PortOpen�����ò�����ͨ�Ŷ˿ڵ�״̬��Ҳ���Դرն˿ڡ�
Input���ӽ��ջ��������غ�ɾ���ַ���
Output�����ͻ�����д���ַ�����
InputLen��ÿ������Input������ַ�������ȱʡֵΪ0��������ȡ���ջ������е�ȫ�����ݡ�
InBufferCount�����ؽ��ջ��������ѽ��յ����ַ�����������0����������ջ�������
InputMode������Input���Ի�ȡ���ݵķ�ʽ��Ϊ0���ı���ʽ��Ϊ1�������Ʒ�ʽ����
RThreshold��SThreshold���ԣ���ʾ��OnComm�¼�����֮ǰ�����ջ��������ͻ������пɽ��յ��ַ�����
������ͨ�����ÿؼ����ԶԴ��ڽ��г�ʼ����ʵ����
�����贮�ں���Ҫ���Ǵ���ͨ�ŵ�ʱ�����ڽ��ջ������ݹ����У�������Ҫ���Ӳ���ӦһЩ�¼��ʹ��������¼������Ǵ������ж˿ڽ������õ�һ�ַdz���Ч�ķ�����ʹ��OnComm�¼���CommEvent���Բ������ͨ���¼��ʹ����ֵ������ͨ���¼������ʱ��������OnComm�¼���CommEvent���Ե�ֵ�����ı䣬Ӧ�ó�����CommEvent����ֵ��������Ӧ�ķ�Ӧ���ڳ�������ClassWizardΪCMSComm�ؼ�����OnComm��Ϣ����������
3.2ϵͳ��ʼ��
��ִ��Ӧ�ó���ʱ���ȱ�����г�ʼ�������ʼ�������ͼ��ͼ2��ʾ��
- TMS320C6711���Ķ�λʵʱͼ����ϵͳ(08-04)
- ��VC++��ʵ�ֿ�������������̣�(12-01)
- DEV C++�Ź���ĽⷨԴ����(12-01)
- ��VC++����MSCOMM�ؼ�ʵ���뵥Ƭ���Ĵ���ͨ��(11-22)
- ����AT89C81��С���绰����ƽ̨(11-20)
- ����VC++���ֳ����߿���ϵͳ��ˮ����ϵͳ�е�Ӧ��(03-10)