嵌入式车牌识别系统的硬件电路设计

图2为一行图像采集和一场(奇场)图像采集时的同步信号时序图。HREF作为无效行和有效行计数器的使能信号,通过在行有效期间对CREF进行计数,在中间512个时钟内使能地址发生器的递增。在VREF信号的上升沿,对HREF进行计数,每场有效图像的前4行,加上每场的26行消隐信号,视为无效图像信号,在无效信号之后的256行,图像信号为有效采集图像信号,视频转换接口控制这256行数据的转换和存储。采集完256行,等待下一个场同步信号的到来,按同样方式对偶场图像进行采集。以上工作都由CPLD来完成。
2.4 帧存储器
车牌识别系统对实时性要求很高,为此本系统的帧存储器采用两级存储器乒乓存储的结构,使前端采集存储数据和后端DSP处理数据同时进行。同时每一级存储器中将奇偶场分开存储,以便在高速运动车辆进行识别的场合只取其中一场进行处理,帧存储器结构如图3所示。
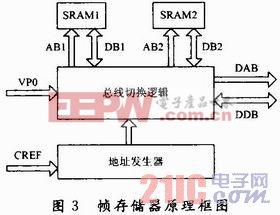
整个帧存储器组的工作过程如下:系统初始化完成后由DSP启动前端采集,此时SAA7111的数据输出(VPO)与SRAM1的数据总线(DB1)连通,地址发生器产生地址总线(AGB)控制SRAM1的地址总线(AB1),将采集到的数据依次保存在SRAM1中;同时DSP数据总线(DDB)与SRAM2的数据总线(DB2)连通,DSP的地址总线(DDB)控制SRAM2的地址总线(AB2),使SRAM2处在DSP的存储器空间中,以省去数据传输,提高系统的实时性。
当一帧图像采集完成后,总线切换逻辑进行总线切换,使总线连接关系转换到如下连接关系:DAB-AB1,DDB-DB1,VPO-DB2,AGB-AB2,完成总线的切换,此时SRAM1处在DSP的存储器空间中,由DSP对SRAM1中的数据进行识别处理,前端采集到的数据在视频数据控制接口的控制下存放到SRAM2中。整个系统在DSP处理完当前帧数据和前端另一帧数据采集完毕后就进行总线切换。
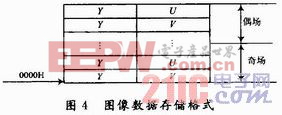
在本系统中,所采用的CCIR601格式的数据的一帧图像容量大小为512×512×2×8b=256K×16b。所以,本系统采用两片CY7C1041(256K× 16 b)作为帧存储器SRAMl和SRAM2,在CPLD的控制下,分别将亮度信号和色度信号放在数据的高8位和低8位,奇偶场数据分别放在存储器的高、低地址段,存储器中的数据存储格式如图4所示。系统的总线控制逻辑和地址发生器都在CPLD中实现。
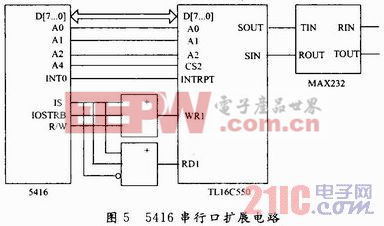
2.5 串行通信接口及E2PROM存储器
本系统通过对DSP进行扩展异步串口,完成向计算机传送识别结果。TI公司的TL16C550是一种可由软件设定16 B或64 B的FIFO,最高可达1 Mb/s的波特率(波特率可编程),具有可编程串行数据发送格式的异步串行通信芯片,可以很方便地与DSP接口。本设计就是采用异步通信芯片来扩展5416的串口,然后通过MAX232进行电平转换完成与PC机串口的通信。接口电路如图5所示。
E2PROM主要完成对识别车牌号码进行存储,实现系统的脱机运行功能。E2PROM采用Microchip的24FC512,其具有64K×8 b存储空间,即可以存储约8 000个车牌记录,利用I2C接口与主机进行通信,本系统通过将DSP的串口McBSP1设置成通用I/O口模拟I2C总线完成对24FC512的数据读写。
3 结语
本系统针对车牌识别系统的特点采用CPLD与DSP相结合设计实现了高速实时的嵌入式车牌识别硬件系统。所设计的系统采用两帧轮换存储的方式,消除了DSP的等待时间,使采集系统和处理系统可以独立工作;图像存储器直接映射到DSP的内存空间,使DSP可以直接对图像数据进行处理,为实时图像处理节省了时间。该系统采用大规模集成芯片SAA 7111A和CPLD,使系统集成度高,可靠性好,成本低,速度快,接口方便,并且可修改及重复编程,也可用于其他的高速实时图像处理系统。
- 基于算法的DSP硬件结构分析(04-02)
- 电力电子装置控制系统的DSP设计方案(04-08)
- LPC2292的μC/OS-II硬件抽象层构建(04-26)
- 基于DSP的宽带雷达多片流水分段脉压处理平台设计(08-02)
- 基于MCU+DSP的运动控制硬件平台设计(10-01)
- 基于DSP和IPM的变频调速系统的硬件设计(11-25)