基于ARM的危险品搬运机器人的设计与实现
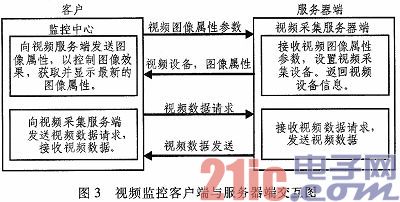
服务器端,接受视频图像属性参数,设置视频采集设备。返回视频设备信息嵌入式嵌入式系统建立起来之后,就可以利用嵌入式操作系统内核提供的接口来开发视频监控软件模块了。它整体运行在服务器端,可以在没有外接网络的条件下独立运行。本模块实现了视频的采集、播放等功能,客户端与服务器端的数据交互如图3所示。
3 搬运机器人系统的软件设计
3.1 服务器端软件设计
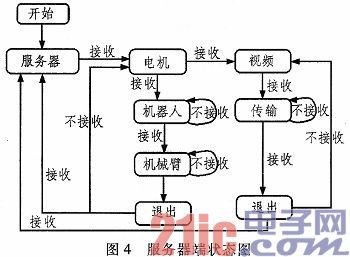
服务器端的软件运行状态图如图4所示,开始进入服务器端,当无命令进入时,为循环等待状态,等待接受命令;当接收到命令时,判断是控制电机还是控制摄像头命令:当控制电机状态,判断为控制机器人还是机械臂;如果是控制机器人,则机器人循环等待控制命令,如果是控制机械臂,则机械臂循环等待控制命令。如果是控制摄像头命令,则进行图像、视频传输;当接收到退出进入服务器状态命令时,退出服务器运行状态。
3.2 客户端软件设计
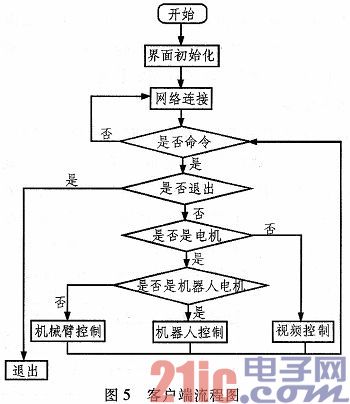
客户端软件流程图如图5所示,首先进入界面初始化,进入网络连接,等待是否有命令,如果没有命令,返回网络连接继续等待,如果接收到命令,判断是否为退出,如果是则退出,如果不是查看是否为电机命令,如果为否则是执行视频监控,如果为是判断是否为机器人电机,如果是,则执行机器人控制,不是执行机械臂。
4 系统测试方案
将系统的电机驱动模块、机械臂驱动模块分开测试,调通后再进行整机调试,提高调试效率。
1)电机驱动模块
首先测试电机控制是否有效。分别给电机一个正转信号和反转信号,观察电机的转向是否正确,如转动正确,说明电平控制有效。然后通过改变PWM脉冲的占空比对电机的转速进行调节。调节信号发生器输出方波的占空比,观察电机转速是否满足,占空比减小则电机减速,占空比增大则电机加速的关系,如果满足上述关系,则说明能够通过改变PWM脉冲的占空比改变电机的转速。经以上两项测试,电机驱动模块正常工作。
2)机械臂驱动模块
首先测试机械臂是否有效,给控制器一个信号,观察机械臂能否运作,能否抬起,旋转,机械手能否抓起东西,如果都能达到,说明机械臂有效。
5 结论
测试表明,机器人能够较好的完成实验的基本要求和发挥部分,通过各种方案的讨论及尝试,再经历过多次的整体软硬件结合调试,不断地对系统进行优化,危险物品搬运机器人能够完成各项功能。在控制策略上,采用人手控制。机器人在进行中不断改变方向,使其能够安全的寻迹行驶,选用的电机有PWM占空比的变化改变机器人运行速度,避免冲出范围。通过无线网络将车载远端控制系统和监控平台结合起来,硬件系统设计合理、小巧、灵活、结构紧凑,实时性好;软件系统模块化设计,测试表明该机器人系统工作可靠,能够满足处理危险物品任务的要求。
- 基于FPGA的扫雷机器人软硬件设计(06-04)
- 安全光幕在机械手臂危险区域防护的应用(12-21)
- 基于CAN总线控制系统的抓物机械手设计(12-20)
- 助力机械手的应用及系统功能分析(12-19)
- 影响机械手平稳性和定位精度的要素(12-20)
- Kinco伺服系统在注塑机机械手上的应用(03-04)