强大的防盗定位追踪系统方案,硬件原理、结构框图、软件流程、源码打包奉送
理解和掌握;DES算法把64位的明文输入块变为64位的密文输出块,它所使用的密钥也是64位,首先,DES把输入的64位数据块按位重新组合,并把输出分为L0、R0两部分,每部分各长32位,并进行前后置换(输入的第58位换到第一位,第50位换到第2位,依此类推,最后一位是原来的第7位),最终由L0输出左32位,R0输出右32位,根据这个法则经过16次迭代运算后,得到L16、R16,将此作为输入,进行与初始置换相反的逆置换,即得到密文输出。 DES算法的入口参数有三个:Key、Data、Mode。其中Key为8个字节共64位,是DES算法的工作密钥;Data也为8个字节64位,是要被加密或被解密的数据;Mode为DES的工作方式,有两种:加密或解密,如果Mode为加密,则用Key去把数据Data进行加密,生成Data的密码形式作为DES的输出结果;如Mode为解密,则用Key去把密码形式的数据Data解密,还原为Data的明码形式作为DES的输出结果。在使用DES时,双方预先约定使用的”密码”即Key,然后用Key去加密数据;接收方得到密文后使用同样的Key解密得到原数据,这样便实现了安全性较高的数据传输。加密模块是本系统的特色,对通信的信息进行加密可以保证通信信息的安全,即使信息被第三方获得也不会得知防盗目标终端的位置。
3.2.6相对位置计算模块原理
相对位置计算模块可以计算A,B两点的相对距离以及B相对于A的方位。相对位置计算模块的入口参数有五个:A点的经度,A点的纬度,B点的经度,B点的纬度,A B两点距离变量的指针,B相对于A的方向变量的指针,B相对于A角度的指针。程序将地球近似看做是一个椭球体,根据赤道半径,极半径,A点经度求得A所在经线圈的半径R1,用R1乘以A B两点的纬度的弧度差就是A点所在纬线圈到B点所在纬线圈的距离d1。同理可求得A点所在经线圈到B点所在经线圈的距离d2。A点到B点的距离等于的d1与d2平方和的开平方。 返回的方向有四种:北偏东,北偏西,南偏东,南偏西,角度介于0到90之间。角度大小等于d1除以d2的商的反正切。
3.2.7 LCD显示模块原理
本系统所使用的LCD是FPGA自带的2线16字符液晶显示器LCD。尽管LCD支持8位的数据接口,为了与其它的XILINX的开发板保持兼容并且尽可能减少针脚数,FPGA仅通过4位的数据接口线控制LCD,如图所示SF_D[11:8]对应于4位数据。LCD_E为使能信号LCD_RS为寄存器选择信号,当LCD_RS为0时,表示写入的是指令,当LCD_RS为1时,表示写入的是数据。LCD_RW为读写控制信号,当LCD_RW为0时,表示是写数据,即LCD接收数据,当LCD_RW为1时,表示是读数据,即LCD输出数据。
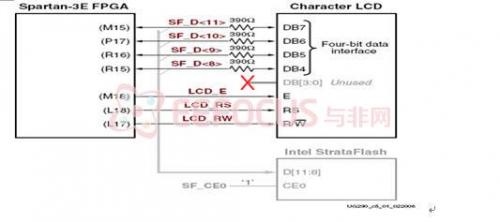
每个8位数据的传输必须被分解为两次4位传输,间隔至少1us。先传高4位,再传低4位。每两个字节之间至少要间隔40us。

本系统使用的LCDIP核分为两部分——硬件部分和软件部分。硬件部分用VHDL实现LCD时序,管脚连接,时序仿真 软件部分用C语言进行验证,向寄存器中送入数据。完成LCD显示功能。硬件与软件是通过VHDL程序中寄存器的基地址来联系起来的。在本设计中,选择了两个32位寄存器,即slv_reg0和slv_reg1。寄存器的基地址是在制作LCD IP核的过程中定义的。所编写C语言程序需要包括对LCD的初始化命令,字符或字符串的显示命令和延时程序,并且可以设置所要显示的字符的首地址。初始化命令具体如下:
(1)功能设置命令,写入0x28。配制对显示屏的操作。
(2)输入方式命令,写入0x06。设置地址指针自动加1。
(3)显示开关控制命令,写入0x0C。打开显示屏。
(4)初始地址命令。
(5)清屏命令。
时钟频率设为1us。
在user logic中定义了四个输出端口,LCD_E,LCD_RS,LCD_RW,lcddata_out[7:4]
选择两个32位的寄存器,slv_reg0和slv_reg1。Slv_reg0作为字节的传输,不论是指令字节还是数据字节都送入slv_reg0。而slv_reg1中选择后三位作为发送数据标志位和指令或是数据的选择位。具体如下:
定义slv_reg1的第29位即slv_reg(29)为发送数据标志位,即当slv_reg(29)为1时,表示数据已准备好,可以传输。slv_reg1的第30,31位为判别输入的是数据还是指令的标志位。当slv_reg(30 to 31)为01时,表示写入的数据为指令数据,当slv_reg(30 to 31)为10时,表示写入的数据为要显示的数据。
当向slv_reg1写入控制数据后,slv_reg0中的32位数据中的低8位就将按照所编写的LCD时序进行操作。送入LCD进行显示
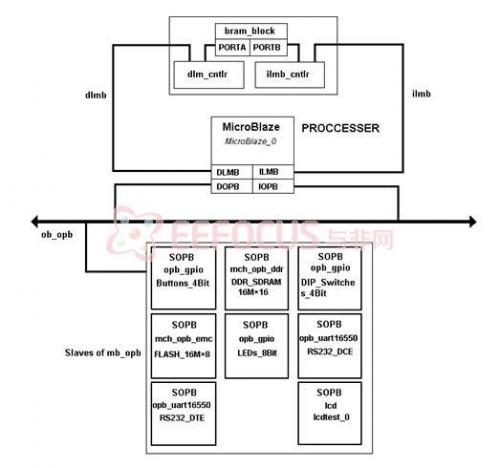
3.3硬件框图
本系统采用了MicroBlaze_0核,MicroBlaze与BRAM的连接采用了LMB方式,与外围设备的连接采用了OPB总线方式其硬件结构图如下(其中只列出了与本系统有关的硬件结构块,省去了一些细节):
Mic
定位追踪 GPS Spartan-3E 射频 CC2420 UART 相关文章:
- 基于GPS和GPRS的小型追踪器设计方案(05-20)
- 基于GPSOne技术的个人定位终端(07-30)
- 2010年中国(成都)电子展胜利闭幕(08-15)
- 基于DSP的车载GPS/DR组合导航系统硬件设计(09-13)
- ARM-Linux平台下GPS信号的采集与处理研究(07-25)
- 基于MiniGUI的GPS导航定位系统设计(02-20)