基于虚拟环绕声的音频处理器设计完整方案
一、应用前景
虚拟环绕声技术是区别于多通道环绕声技术的另一类声重放系统,它利用声源到双耳的传递函数(HRTF)通过双耳(即空间两点)声信号的传输与重放,实现声音空间信息的传输与重放,这种系统只需两路独立的传输信号和重放扬声器(或耳机) ,因而在一些不便于安装多通道放声系统的环境下,对改善电视机、手机、MP3/MP4等等电子产品的音频声效有很大的帮助。
二、项目背景
虚拟听觉空间(VAS)是一门新兴的边缘交叉学科,涉及听觉心理学、听觉生理学、多传感器集成与融合、人工智能、并行计算和高性能计算机系统等多个研究领域。VAS有时也称为虚拟听觉显示(Virtual Auditory Display)、三维声再现系统(3D Sound Rendering/Reproducing System)、虚拟声再现系统(Virtual Sound Rendering/Reproducing System)、空间声音再现系统(Spatial Sound Rendering System)、虚拟空间/三维听觉系统(Virtual Spatial/(3D)Auditory Systems)、声音空间化系统(Sound Spatialization System )和双耳技术(Binaural Technology)等,是通过对双耳的声音信号进行捡拾、模拟和重放,让倾听者在虚拟环境中听到的声信号逼近在真实环境声场中听到的声信号,因而在电影院、家庭影院中得到了很好的应用。其中多通路环绕声经过许多年的发展,也获得了很好的效果,也先后出现了5.1、6.1、7.1甚至10.2通路的环绕声系统,而且5.1通路环绕声系统也为国际电信联盟(ITU)所推荐。
此外,为了适应音频的播放,特构建了一款音频DSP处理器以适应本系统。
三、项目立意
在耳机声源定位算法的框架上,采用MIT媒体实验室的KEMAR人工头HRTF数据库对3D虚拟环绕声的滤波器设计进行改进;
改进通用处理器体系结构,移植适合于音频处理DSP IP Core到FPGA上;
利用硬件描述语言直接实现算法,并与DSP IP Core进行集成;
在FPGA平台上进行IP核的设计,在Xilinx的FPGA平台上予以验证,并对功耗和时钟进行优化
四、原理和技术特点
1.本系统由以下三大部分构成:
A.虚拟环绕声模块;B.DSP处理器模块(包括了音频解码,音效叠加等模块);C.音频还原。总体框图大致如图1所示,

图1系统总体框图
DSP音频处理器是本系统的核心,负责音频解码,信号叠加等处理。虚拟环绕声模块,负责针对音频信号产生虚拟的环绕声音频效果。DAC负责还原出音频信号。在这些基本功能的础基上,实现诸如音频检索等新功能。
2. 虚拟环绕声原理介绍
由于虚拟环绕是以人耳的声源定位为基础的,故在此主要对人耳的声源定位予以介绍。心理声学的基本要素是到达人耳的声音的频率、强度和谱结构。以下将进一步讨论基于心理声学的声源定位、距离感知及包围感等。
2. 1 人耳对声源的定位
在自然听音中,人的听觉系统对声源的定位取决于多个因素——双耳接收到的信号差异用来决定声源的水平位置,由外耳对高频信号的反射所引起的耳郭效应决定声源的垂直位置,而人耳的某些心理声学特性对于声源的定位也起到很大的作用。
2.2 双耳效应
在自然听音环境中,双耳信号之间的差异对于声源的定位是非常重要的。该因素可以在直达声场的听音环境中得到最好解释,如图2所示。
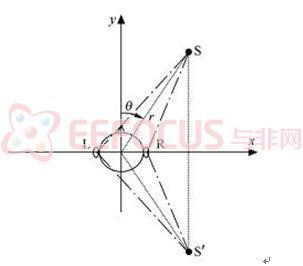
图2 声源S与镜像声源S′引入最大程度相似的双耳因素
声源位于水平面上,水平方位角为θ,与人头中心的距离为r,到达左右耳的距离分别为SL和SR。由于SL>SR,声音首先到达右耳,从而在到达双耳的时间先后上形成时间差。这种时间差被定义为双耳时间差(interaural time difference,ITD) ,它与声源的水平方位角θ有关。当θ = 0°时, = 0;当θ = ±90°时,达到最大值,对一般人头来说,为0.6~0.7ms 的数量级。
,它与声源的水平方位角θ有关。当θ = 0°时, = 0;当θ = ±90°时,达到最大值,对一般人头来说,为0.6~0.7ms 的数量级。
在低中频(f 1.5kHz)情况下,双耳时间差是定位的主要因素,这时对固定频率的声音,双耳时间差与双耳相位差是相对应的。然而对于更高的频率,虽然双耳时间差的概念依然正确,但双耳相位差的概念将变得模糊不清。以正弦声音为例来进行解释,设双耳时间差的最大值为Δtmax,则角频率为ω的正弦声音在左、右两耳产生的相位差为ΔΦ = ωΔtmax。可以看出,当ω较小时,声音频率较低,波长较长,由时间差所造成的相位差有确定的意义,双耳可以根据它来判定声源的方位;当ω较大时,即声音频率较高、波长较短时,由时间差所形成的相位差数值将较大,甚至会超过180°,使人不能判断是超前还是滞后,因而失去了作为声源定位因素的意义。所以双耳相位差只对低频声的方位判断起主要作用,而双耳时间差(严格说是群延时)则可作为1.5~4.0kHz的一个定位因素。
虚拟环绕声 音频处理器 FPGA DSP音频处理器 相关文章:
- 基于PIC单片机的数码虚拟环绕声控制器设计(11-26)
- 在采用FPGA设计DSP系统中仿真的重要性 (06-21)
- 基于 DSP Builder的FIR滤波器的设计与实现(06-21)
- 基于FPGA的快速并行FFT及其在空间太阳望远镜图像锁定系统中的应用(06-21)
- 3DES算法的FPGA高速实现(06-21)
- 用FPGA实现FFT算法(06-21)