强大的防盗定位追踪系统方案,硬件原理、结构框图、软件流程、源码打包奉送
分别在Spartan-3E开发板上实现,通过无线传输模块通信,另外加上GPS信号接收器接收卫星信号。
无线传输模块方案选择与论证
方案一 选择cc2420模块进行通信
CC2420是Chipcon公司推出的一款符合IEEE 802.15.4规范的2.4GHz射频芯片,用来开发业无线传感及家庭组网等PAN网络的ZigBee设备和产品。cc2420通信免费,但通信距离短,室外传输距离只有300米左右,室内传输距离只有几十米,而本产品所使用的gps信号接收器定位误差为50米,若使用CC2420则定位的范围非常小,而在小范围内定位又不精确,从而使本产品的应用范围和应用价值都大打折扣。
方案二 选择GSM模块进行通信
GSM全名为:Global System for Mobile Communications,中文为全球移动通讯系统,俗称全球通,是一种起源于欧洲的移动通信技术标准,是第二代移动通信技术,其开发目的是让全球各地可以共同使用一个移动电话网络标准,让用户使用一部手机就能行遍全球。 GSM通信系统为了传输需的各种信令,设置了多种专门的控制信道。GSM通信随收取一定费用,但通信距离长,死角少,可以实现全球通信,无论两终端相距多远都可以通过GSM进行通信。
2.2.2最终方案设计思想及框架示意图
防盗目标终端和寻找指引终端两部分均分别在Spartan-3E开发板上实现,利用GPS信号接收器接受信息,使用GSM模块进行传输。防盗目标终端的FPGA开发板又包括三个模块:UART模块(实现DTE和DCE的串口通信),经纬度提取模块(提取出经纬度信息),加密模块(将经纬度信息加密)。寻找指引终端的FPGA开发板包括UART模块,经纬度提取模块,解密模块(将传入的信息解密),相对位置计算模块(通过对自身经纬度和防盗目标终端经纬度的计算得出防盗目标终端相对于寻找指引终端的位置),和LCD显示模块(显示防盗目标终端的相对位置)。
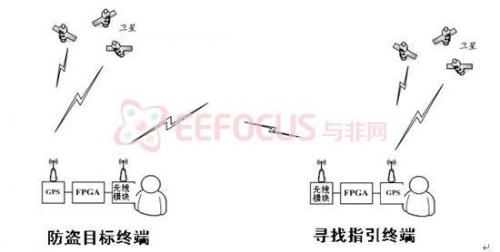
系统构成示意图
2.3功能与指标
1) 防盗功能:这是设计本系统的最终目的。将防盗目标终端放到贵重物品上当物品丢失后,按下寻找指引终端上的按键后,可以在LCD液晶屏上看到防盗目标终端相对于寻找指引终端的位置和方位,从而达到防盗的目的。
2) 定位功能:这是本系统的最基础功能,它是实现防盗功能的一个步骤,但对于用户来说确实是一个非常重要的功能,当用户按下寻找指引终端上的按键后可以在液晶屏上显示自身经纬度,从而实现对自身的的定位
3) 追踪功能 :这是本系统的扩展功能。防盗目标终端除了作为防盗器以外还可用作定位器,将防盗目标终端放到需要追踪的目标上,通过寻找指引终端可以准确的知道追踪目标的位置从而对追踪目标进行实时追踪。
指标:本系统所产生的误差主要是由GPS信号接收器导致,因为系统所使用的GPS信号接收器属于较低端的信号接收器,信息误差大约在50米左右,所以本系统要求实现寻找指引终端对
防盗目标终端的定位,相对距离误差不超过100米,寻找指引终端对自身经纬度进行定位误差不超过50米。
3 实现原理
3.1 系统原理
当按下寻找指引终端上的按键时,寻找指引终端通过GSM模块向防盗目标终端发出请求信息,防盗目标终端接收到该信息后,通过GPS信号接收器接收卫星信号,FPGA通过DTE接口接受该信息并在gps模块中提取出经纬度信息,该信息在加密模块中进行加密然后又通过开发板上的DCE接口传送给GSM模块,GSM模块将该息发送给寻找指引终端,寻找指引终端通过GSM模块接收该信息,并在解密模块中对信息进行解密,同时用与防盗目标终端相同方式确定自身位置,防盗目标终端传来的位置信息和寻找指引终端自身接受的位置信息一并传入相对位置计算模块。在相对位置计算中寻找指引终端计算出两终端的相对位置以及防盗目标终端相对于寻找指引终端的方位。
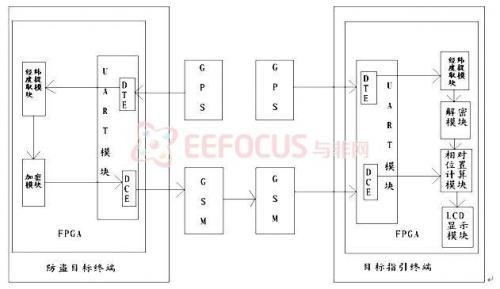
系统原理示意图
3.2各模块实现原理
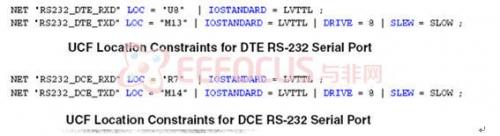
3.2.1 UART模块实现原理:
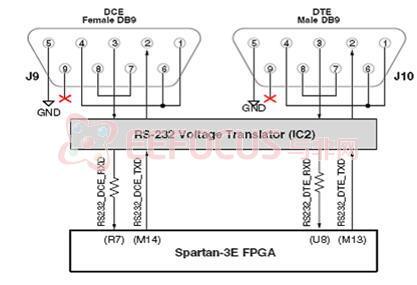
FPGA使用LVTTL或LVCMOS电平提供串行数据给Maxim 器件——用来电平转换的,以满足RS-232电压的电平。反之,Maxim 器件转换相应的LVTTL电平以满足RS-232串行输入数据给FGPA。在Maxim与FPGA的RXD管脚之间串联一个电阻,以保护外部逻辑干扰。
连接器不支持硬件流控制。DCD、DTR和DSR信号连接一起,同样,端口的RTS和CTS信号连接在一起。
本系统的UART模块是在EDK 10.1环境中开发完成,利用了开发环境所提供的uartns550_v1_00_b驱动程序,该驱动提供了发送函数void XuartNs550 SendByte (Xuint32 BaseAddress, Xuint8 Data)和接收函数unsigned int XuartNs550 RecvByte(Xuint32 BaseAddress)。从而使程序可以通过Uart每次发送接收一个字节的数据。
3.2.2 GPS模块原理
GPS 定位的基本原理是根据高速
定位追踪 GPS Spartan-3E 射频 CC2420 UART 相关文章:
- 基于GPS和GPRS的小型追踪器设计方案(05-20)
- 基于GPSOne技术的个人定位终端(07-30)
- 2010年中国(成都)电子展胜利闭幕(08-15)
- 基于DSP的车载GPS/DR组合导航系统硬件设计(09-13)
- ARM-Linux平台下GPS信号的采集与处理研究(07-25)
- 基于MiniGUI的GPS导航定位系统设计(02-20)