基于CAN总线的电动汽车整车参数测试网络
1、引言
现代交通的迅猛发展带来的能源与环境危机已经成为世界性的难题。发展电动汽车,采用清洁能源,被认为是最好的解决方案之一。为此,各国投入了大量的人力物力进行电动汽车的研究,并取得了可喜成果。
电动汽车不仅包括传统汽车的运行速度、行驶里程等参数,还包括电动汽车独有的能耗、电源电压、电流及电机转速等电气参数,参数多达100多项。掌握这些参数对于分析电动汽车整体运行性能有着重要意义。这些参数类型各异、位置分散,要想集中测量存在很大困难。因此,需要分散测量,再通过监控节点集中显示和记录的方式构造测试网络。控制器局域网CAN(controller area network)能有效支持分布式和实时控制的串行通讯,与其它现场总线相比,它具有简单可靠、速率高、无主从以及连接方便等诸多优点,是一种在汽车车载测控网络中成熟应用的总线形式。因此,我们选用CAN总线构造电动汽车整车参数测试网络。
2、CAN总线网络总体结构
2.1 监测网络总体结构
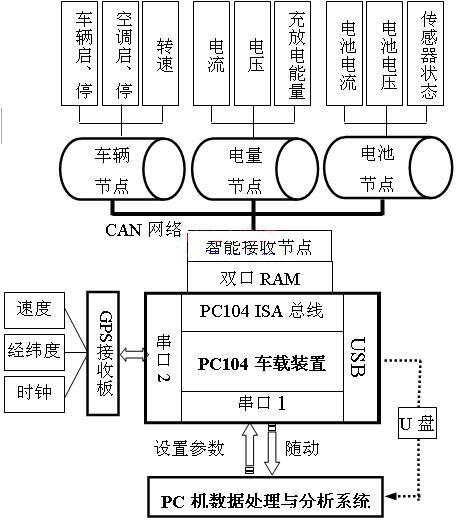
图1 系统总体结构框图
电动汽车整车运行参数监测网络共由9个CAN节点构成,包括1个负责网络调度与数据处理的PC104监控节点和8个单片机数据采集节点。8个数据采集节点包括1个车辆参数采集节点、1个动力电池参数采集节点、1个辅助电池参数采集节点、1个电机参数采集节点和4个电池参数采集节点。由于动力电池节点、辅助电池节点和电机节点采集的参数都是电压、电流以及充放电的能量,因此可以将这三个节点作为一类节点设计,统称为电量参数采集节点。动力电池由40节12V铅酸蓄电池串联而成,串联电池组的性能取决于每节电池的性能,40组电池参数在4个电池节点中分别进行测量,每个节点负责测试10节电池的参数,因此4个电池参数采集节点是另一类数据采集节点。此外,还有1个车辆参数采集节点,主要采集车辆的各种状态,包括车辆启动、停止,空调的开关状态,发动机的转速(针对混合动力车),电机转速。因此这个系统包括了3类数据采集节点,即电量节点、电池节点和车辆节点。整个系统的结构如图1所示。
在整个的系统中,共有3类8个数据采集节点,完成146项参数的采集。采集的数据通过CAN总线将数据发送到监控节点,监控节点也通过微处理器完成总线上数据的接收。同时,该节点通过双口RAM和一台PC104计算机的ISA总线通讯,PC104通过双口RAM获取监控节点从总线上收到的数据,并将数据进行显示和记录。同时,PC104还通过一个串行口直接接收GPS数据接收板的车辆速度、经纬度和时钟信息,并作为同步信息进行记录和显示,以便将汽车的实时性能与速度和运行地况联系起来。信息每0.5秒记录一次,采用变化记录的数据压缩算法,并以*.dat文件格式进行存储。
2.2 网络中传输的信息
CAN总线是通过信息帧传输数据的,可分为数据帧、远程帧、错误帧和超载帧。信息以报文为单位传输,不同的报文以标识符(ID)进行区分,标识符越小,报文的优先级越高。
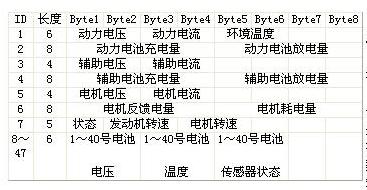
监控节点发送信息的报文标识符为00H,用于向数据采集节点发送查询信息,采集节点收到监控节点的查询信息后,向总线上发送自己的一包数据,监控节点收到以后确认此节点工作正常。通过这种方式,监控节点可以随时查询网络中连接了那些数据采集节点。由于报文所带数据长度最大为8字节,对于测量参数较多的电量节点和电池节点,需要分配较多的报文标识符。每个电量节点分配2个标识符,每节电池分配1个标识符。因为与参数相联系的报文标识符是固定的,根据收到的标识符就可判断收到的是哪个参数。电动汽车整车参数监测网络中传送的报文标识符(ID)与参数的对应关系见表1:
表1 报文标识符与参数对应表
3、数据采集节点的设计
作为一个运行参数监测网络,数据采集是系统工作的基础。本系统共有3类8个数据采集节点,即车辆参数采集节点,3个电量参数采集节点和4个电池参数采集节点。下面将分别就3类节点的设计进行介绍。
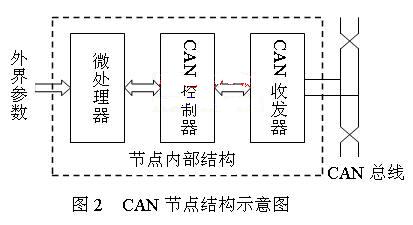
系统中所有的数据采集节点都采用如图2所示的结构,包括一个微处理器、一个CAN控制器和一个CAN收发器。微处理器采用INTEL公司的80C196KB,主要负责采集外界的各项参数,同时管理和调度节点的工作,当采集到一组合理的数据以后,通过操作CAN控制器向总线上发送数据。CAN控制器选用了SJA1000,它集成了CAN2.0A和CAN2.0B的总线协议,负责完成数据的发送和接收。CAN收发器82C250是CAN控制器和物理总线的接口,其内部驱动电路具有限流电路,提供对总线的差动发送和接收功能,同时采用了光电隔离同总线交换数据,有助于抑制汽车等恶劣电气环境下的瞬变干扰。
3.1 车辆参数采集
- Labview基本常见问题解答(连载四)(05-10)
- CAN总线系统测试技术(05-11)
- 基于CAN总线的GaAs光电阴极制备测控系统(07-27)
- 基于LabVIEW的智能开关综合保护装置的数据获取与处理(03-09)
- 基于双层CAN总线的声纳数据通信系统设计(01-23)
- CAN总线网络测试研究(02-10)