基于小波变换的视频应变测量系统设计与实现
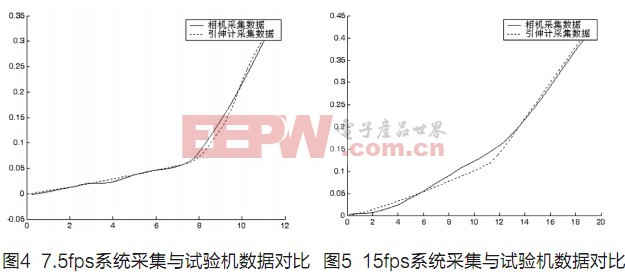
据试验数据的精密度评定方法,在试验中,得到的测量值M由真值T与实验误差δ两部分组成,即M=T±δ。真值是未知的,一般采用多次测量求算术平均值作为其真值。 采集频率对系统算法实现的影响 视频应变测量系统应用于动态图像测量,因此需研究影响系统数据结果的时间因素,即分析不同采集频率对小波变换期望亚像素算法精度的影响。 试验条件:三角架放在试验机上,固定摄像机,距试件大约200mm附近,具体距离根据工件图像清晰程度调节,装置如图2所示,用引伸计作为标记。打开试验机,开始试验,动横梁向下移动,选定横梁移动速度约3mm/min,工件进入拉伸试验阶段,摄像机采集试验数据,进行分析计算。具体试验参数如下:试验机拉伸速度3mm/min;光照度726LUX;物距192mm;测量标距50mm;光圈5;焦距14。 1、采集频率15帧/秒 在图4为在相机采集的数据中,把帧数换算为时间,与试验机采集的时间相匹配作为横坐标,纵坐标为变形值,虚线是引伸计采集数据,实线是相机采集的数据。 当采集频率7.5帧/秒时,相机采集数据与引伸计采集数据的平均误差为: 2、采集频率15帧/秒 同上处理得出,当采集频率15帧/秒时,相机采集数据与引伸计采集数据的平均误差为: 3、采集频率为30帧/秒 采集频率30帧/秒时,相机采集数据与引伸计采集数据的平均误差为: 通过对视频应变测量系统数据结果在不同图像采集频率下的分析,可以得出在光照、物距、焦距等外界因素不变的条件下,随着相机采集频率(7.5帧/秒、15帧/秒、30帧/秒)的提高,数据误差会随着增大。但该系统在30帧/秒情况下,可以满足一定的误差要求,而不至于误差过大,使得测量结果不精确。 结语 本文所设计的基于小波变换视频应变测量系统,精度较高,且具有一定的实时性要求,能够满足实际的需要。随着电子技术、机械科学、光学和计算机科学技术[8]的发展,应用于视频应变测量系统的精密边缘检测技术,将会有长远的发展。 参考文献 [1]聂毓琴,孟广伟.材料力学[M].长春:吉林科学技术出版社,2000. [2]于起峰,陆宏伟,刘肖琳.基于图像的精密测量与运动测量[M].北京:科学出版社,2002. [3]张学成,杨敏华,张英杰.灰度矩边缘精确定位法的测量应用探讨[J].计算机测量与控制,2006,14(11):1446-1449. [4]李弼程,罗建书.小波分析及其应用[M].北京:电子工业出版社,2003. [5]丁兴号.基于小波变换的亚像素边缘检测[J].仪表仪器学报,2005,8(26):801-804. [6]David J,Kruglinski.Visual C++技术内幕[M].北京:清华大学出版社,1999. [7]甄红涛,齐晓慧.一种非均匀行采集的智能车路径识别算法[J].电子产品世界,2010,11:27-30. [8]盖素丽.基于CPU的数字图像并行处理方法[J].电子产品世界,2009,2:38-40.



小波变换 视频应变测量 采集频率 30帧 秒 201104 相关文章:
- 基于多传感器图像融合的温度场测试系统(01-06)
- 一种随钻泥浆脉冲信号的处理方法(10-22)
- 在线传感器突变信号的检测与区分(06-09)
- 小波变换在液氮制冷式露点自动检测中的应用(05-29)
- 基于小波变换微弱生命信号提取的研究(12-11)
- 基于飞行时间法的纳秒量级时间间隔测量系统研制(03-08)