基于小波变换的视频应变测量系统设计与实现
引言
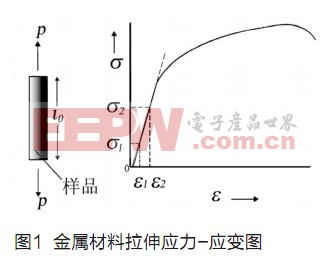
应变是材料测试中的重要参数,材料力学的一个重要研究领域是通过建立材料的应力-应变关系如图1,研究和预测材料的力学行为[1],所以应变的获取关系到是否能正确和有效地构建材料的本构方程。在实验力学中,应变并非直接测量,它是通过对材料绝对变形测量后再按照相应的应变定义计算得出。
实际中通常采用机械式引伸计夹持在工件上,对工件施加载荷的同时进行测量。对于刚性材料,应变一般可以使用传统的机械夹持式引伸计进行测量。然而,这类装置对诸如纤维、薄膜、泡沫等软塑性材料的工件就无法使用,因为它们的重量和夹持方法都会影响试验结果与断裂点。在实际情况下,需要测知超大应变范围直至断裂的材料性能,受行程限制,机械式引伸计需要在试件断裂前提下,对于一些特定环境条件下的工件,例如高温条件,机械引伸计使用也会受到限制。
为减少测量误差、提高测量的精度及提高实际的适用范围。在材料拉伸试验的背景下,设计并采用视频应变测量系统间接测量材料拉伸试验中实时变化的应变。该应变测量系统既要满足试验的测量精度,又要保证测量的实时性。文中在材料拉伸试验应变测量的精密边缘检测算[2,3]法进行了深入研究,在成熟的小波变换理论下,创新地将小波变换期望亚像素算法应用于视频应变测量系统设计中。
小波变换期望值亚像素定位法
小波分析是一种多分辨率分析[4],能在时域和频域突出信号的局部特征,现已广泛应用于去噪和边缘检测等图像处理领域。
小波变换边缘检测原理
一维小波函数表示如下:

图像函数f(x)在小波尺度a下的小波变换由卷积运算得到:

对于某些特殊的小波函数,小波变换的模极大值对应信号的突变点。设是一个平滑的函数,定义为的一阶导数:

记作,则在小波尺度a下的小波变换就为:

小波变换正比于被平滑的函数f(x)的一阶导数,则的极大值对应的是导数的极大值,它也正是在小波尺度a下,信号的局部突变点。因此,小波变换模极大值检测可应用于图像的边缘检测[5]。
小波变换期望值亚像素定位法原理
设一维理想边缘模型为:

其中,
对实际的成像系统,由于CCD是积分器件,它的输出灰度值与其感光面上的光强分布相关。设G(x)表示成像系统点扩展函数,其通常可用高斯函数近似表示:

成像系统所获取的理想边缘无噪声图像为:

其中:x0为边缘图像的准确位置。
设wf1(a,x)表示,在小波尺度a下的小波变换系数,p(x)为大于给定阈值T的小波变换系数概率。推导经CCD成像(含实际噪声)后边缘图像的准确位置。
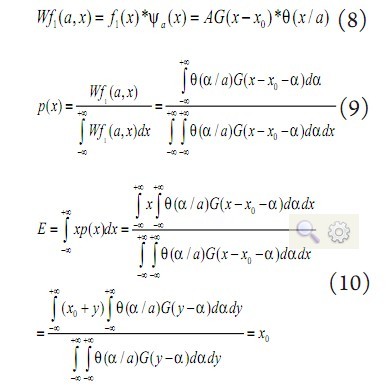
期望值即是理想边缘经成像系统所得实际图像边缘的准确位置。
对于离散信号,设是图像边缘信号的小波变换系数,为大于给定阈值T的概率,E是阶跃边缘位置x的期望值,则有:

由此得到的小波系数期望值E即为图像边缘的准确位置。
小波变换期望值亚像素定位法求解步骤
小波变换期望值亚像素边缘检测具体定位步骤如下:
1)选择一个小波尺度a,对给定的数据执行小波变换;
2)求出在小波尺度a下的小波变换系数的模极大值;
3)滤除由噪声产生的,小波变换系数中随小波尺度a的增加而减小的模极大值;
4)给定一阈值T,滤除由噪声与微小细节生成的模极大值;
5)在模极大值附近,寻找和模极大值同符号的小波系数区间,该区间内的小波变换系数由式(12)求期望,所得期望值即是图像边缘的亚像素位置。
理论可证明,小波变换边缘检测定位法不存在原理误差,同时具有较强的抗噪性能。有关试验已表明,在对光源等环境条件没有特殊要求的情况下,其边缘定位检测的精度能够在0.02个像素以内[5],验证了理论的正确性。另外,小波变换期望值边缘检测亚像素定位法是建立在信号小波变换基础上的,而Mallat方法的提出,使得小波变换的速度大大提高[4],因此小波变换期望值边缘检测亚像素定位法,无论是在其精度、抗噪性能还是速度等方面,都已有比较优越的性能。
测量试验与结果
试验设备及系统软件设计
试验硬件:CCD——德国Basler A601f;镜头——Computar公司的H6Z0812镜头;图像处理卡——Matrox公司的Meteor-Ⅱ/1394卡;光源——自制的LED面光源。试验过程中采用材料试验机进行动态拉伸试验。所使用的材料试验机具体参数为:力测量精度在负荷传感器容量的0.4%~100%范围内,精度为示值的±0.5%;位移速度精度优于±0.5﹪(空载、检测距离大于20mm)。试验设备如图2所示:

在Windows XP操作系统下,利用Visual C++高级语言编制系统软件[6,7],实现算法操作,系统界面及显示结果如图3。
根
小波变换 视频应变测量 采集频率 30帧 秒 201104 相关文章:
- 基于多传感器图像融合的温度场测试系统(01-06)
- 一种随钻泥浆脉冲信号的处理方法(10-22)
- 在线传感器突变信号的检测与区分(06-09)
- 小波变换在液氮制冷式露点自动检测中的应用(05-29)
- 基于小波变换微弱生命信号提取的研究(12-11)
- 基于飞行时间法的纳秒量级时间间隔测量系统研制(03-08)