一种高功率因数电源的设计与实现
1 引言
随着电子电力技术的发展,要求电子元器件的供电电源越来越苛刻。一般元器件供电都是直接从市电中获得,但由于电网的输入阻抗呈容性,而大量整流电路造成电网网侧输入电压与输入电流间存在较大相位差,输入电流呈脉冲状,谐波分量很高,严重干扰电力系统。据了解现阶段一般电网网侧功率因数约为0.65,因此,高效率利用能源,提高电源功率因数已刻不容缓。
现阶段功率因数校正PFC(Power Factor Correction)分为主动式与被动式两种。被动式PFC结构简单,主要是利用电感线圈内部电流不能突变的原理调节电路中的电压与电流相位差,从而改变功率因数,但其结构笨重,易产生低频噪声且最大功率因数只能在70%。主动式PFC一般为有源功率因数调整,可简单归纳为升压型开关电源电路,具有体积小,输入电压宽以及功率因数高等优点,功率因数可接近100%。
2 高功率因数电源设计方案
2.1 功率因数监测
该设计采用相位差测量法,即分别对变压器副边检测的电压、电流信号先经比较器整形,然后通过计算得到电压电流的相位差,再进行余弦运算,即可得到系统的功率因数。负载端输出电压、电流经采样得到系统视在功率。根据P=S×cosQ=S2-P2(Q表示无功功率)计算电源的有功功率、无功功率等参数。该方法易于操作,而且通过等精度法测相,可达到很高精度,从而能很好满足系统要求。
2.2 功率因数校正
该系统采用有源功率因数校正,可改善电源输入功率因数,减小输入电流谐波。其主要实现方式有2 种:(1)两级PFC技术,即在整流滤波和DC/DC功率级之间加入有源PFC电路为前置级,用于提高功率因数和实现DC/DC级输入的预稳,该技术一般用于较大功率输出场合;(2)单级PFC技术,即将PFC级与DC/DC级中的元件共用,实现统一控制,通常共用器件为MOSFET。该方式设计与优化尤为重要,适用于小功率应用。
有源功率因数校正的控制方式又可根据电感电流是否连续分为平均电流型控制、CCM/DCM边界控制和电流箝位控制模式。其中CCM/DCM边界控制 Boost PFC是一种滞后控制技术,其上限为正弦基准电流,由输出检测信号经误差放大后与输入全波电压检测信号相乘得到,下限为零。具体工作过程为:检测电感电流并与正弦电流基准信号相比较,当电感电流达到该基准时,关断开关:当电感电流为零则再次导通,使电感电流为临界电流工作状态。即CCM/DCM边界,可消除二极管的反向恢复损耗,大大减小主开关的非零电压导通损耗。该技术优点是控制简单,使用专用器件的外围元件数量少。运用Boost电路的PFC,在 CCM模式下输入电流畸变小且易于滤波,开关管的电流应力也小,可以处理较大的功率并保持较高的效率。
这里选用CCM模式PFC控制器UCC28019实现最终的功率因数校正。该器件采用软启动机制,动态响应良好,结合外围电路可实现输入欠压保护,开环保护,输出过压保护,软过流控制(SOC)和峰值电流限制等功能。系统输出电压由该器件VSENSE引脚所接分压电阻与其内部+5 V的基准决定。由公式 可得,通过调节分压电阻的比率实现输出电压的数字可调。
可得,通过调节分压电阻的比率实现输出电压的数字可调。
3 系统整体方案设计
该系统采用MSP430F449为控制和运算核心,通过等精度测相法测量出系统的功率因数。功率因数校正则以UCC28019为核心,利用硬件电路形成闭环反馈电路,实时监测输出电压、电流。单片机提供过流保护来控制继电器以及采样和显示电压电流。利用键盘选择各种功能。LCD实时显示各操作数据,人机界面友好。图1为系统整体框图。

4 系统硬件电路设计
4.1 功率因数测量电路
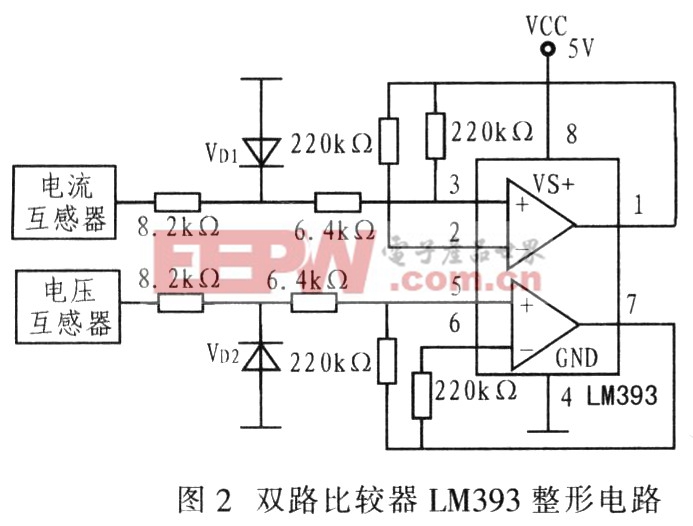
变压器副边处通过电流互感器和电压互感器取样交流信号,然后经双路比较器LM393整形后利用等精度法测量相位差,得到系统功率因数。LM393的整形电路如图2所示。
4.2 输出电流与电压采样电路
在电路负载输出端加一精密大功率电阻,利用I/V转换即可得到输出电流。输出电压的测量则通过分压其转换为MSP430内部A/D转换器可识别的电压,再进行采样。
4.3 功率因数校正电路
功率因数校正电路以UCC28019为核心,通过一系列外围元件取值使功率因数校正到98%以上。图3为采用UCC28019设计的功率因数校正电路。

4.4 过流保护电路
通过单片机实时采样输出电流。当电流过大时单片机控制继电器模块使其断开,系统断电;当故障排除后测得电流值小于预定值时单片机再次发指令使继电器闭合,电路重新正常工作。
5 系统软件设计
系统软件控制功率因数测量部分测相电路的工作,以及实时采样输出电压、电流。当检测到输出电流大于2.5 A时,控制继电器关断和电路复位,LCD实时显示电源当前参数,通过键值的设定实现输出电压的步进可调。系统软件设计流程如图4所示。
- 基于PLC实现注塑机的电气控制(12-05)
- 电源模块均流的基本原理、实现方法及仿真应用(12-24)
- 工程师经验谈:如何实现一个驱动电路的三次设计?(01-18)
- 双输出 DC/DC 控制器结合了数字电源系统管理和模拟控制环路以实现 ±0.5% 的 Vout 准确度(11-07)
- 基于CAN总线的电流、电压变送器的设计与实现(10-26)
- 利用PSoC1实现基于WPC协议的电力发送器设计(09-19)